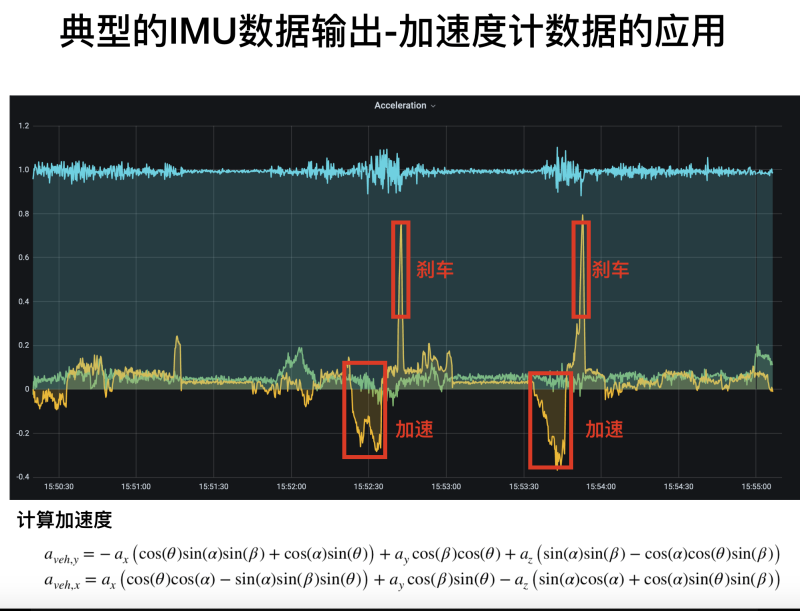
实现车主危险驾驶行为识别。基于传感器数据,通过互补滤波算法计算,判断车辆是否处于急加速,急减速,急变道,急转弯等危险驾驶。基本思路是通过加速度计数据计算车辆方向加速度,陀螺仪计算车辆在特定时间长度内转弯的角度。









评论