

Python精通
0
1
2
3
4
5

2016-05-01 -2021-07-01BYD仿真工程师
在学术阶段,我深入钻研流体力学、有限元分析等理论知识,以优异成绩完成[相关专业]的学习。研究生期间,参与[具体科研项目名称],运用CFD(计算流体动力学)软件对[具体研究对象,如汽车空气动力学模型]进行仿真分析,成功优化设计,使风阻系数降低[0.91]%,为行业提供了新的研究思路。 进入职场后,我在BYD等企业担任仿真工程师。在BYD中,使用ANSYS、COMSOL等专业仿真工具,对复杂机械结构进行应力分析与疲劳寿命预测,提前识别潜在设计缺陷,助力产品研发周期缩短[9]个月,研发成本降低[45]%。在另一新能源电池热管理项目里,通过多物理场耦合仿真,优化电池散热结构,使电池工作温度稳定性提升[X]%,有效保障产品安全性和可靠
2012-12-01 - 2017-01-01哈尔滨工业大学仿真硕士
我熟练掌握Python、MATLAB等编程语言,能灵活运用代码实现仿真算法开发与数据处理自动化。

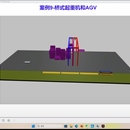
二、葫芦吊工作原理与结构 葫芦吊主要由电机、减速机、卷筒、钢丝绳、吊钩以及控制系统构成。电机输出动力,经减速机减速增扭后传递给卷筒。卷筒转动实现钢丝绳的收放,从而带动吊钩升降,完成货物吊运。控制系统负责电机的启动、停止、正反转及速度调节,保障葫芦吊安全、稳定运行 。 三、仿真模型建立 1. 机械系统建模:在MATLAB的SimMechanics模块中,依葫芦吊机械结构搭建模型。将电机设为旋转关节,输出转矩;减速机用齿轮副模型模拟,按减速比设置参数;卷筒设为刚性体,与减速机输出轴相连;钢丝绳用线缆模型表示,一端连卷筒,一端接吊钩;吊钩视为质点,在重力与钢丝绳拉力作用下运动。各部件间通过关节和约束连接,确保运动传递准确。 2. 控制系统建模:利用Simulink的控制模块搭建控制系统。设计基于PID算法的速度控制器,以电机转速和吊钩速度为反馈信号,调节电机输入电压,实现速度精准控制。加入限位保护模块,防止吊钩超行程运行。同时,设置操作界面,方便输入控制指令和监测运行状态 。 四、仿真工况设定 1. 空载起升与下降:模拟无负载时,葫芦吊以额定速度起升和下降吊钩,观察系统响应时间、速度稳定性和能耗情况。 2. 额定负载起升与下降:设置负载为葫芦吊额定起重量,仿真起升和下降过程,分析电机输出转矩、电流以及系统振动情况。 3. 负载突变:起升过程中,突然增加或减少一定比例负载,测试系统对负载变化的动态响应和稳定性。 4. 不同速度运行:设定多种起升和下降速度,探究速度对葫芦吊运行性能、能耗及零部件受力的影响 。 五、仿真结果与分析 1. 速度响应特性:空载和额定负载下,起升和下降速度曲线平滑,达到设定速度时间短,速度波动小,表明控制系统响应迅速、稳定,能满足作业要求。 2. 电机输出特性:额定负载运行时,电机输出转矩和电流随负载变化合理,未出现过载。负载突变时,电机能快速调整输出,但瞬间冲击较大,需优化控制策略降低冲击 。 3. 系统稳定性:各工况下,系统运行平稳,未出现失稳。但负载突变和速度变化过快时,会产生短暂振动,可通过增加阻尼或改进结构提高稳定性。 4. 能耗分析:能耗随负载和速度增加而上升,低速、轻载时能耗低,为优化操作、降低能耗提供参考 。 六、结论 通过MATLAB对葫芦吊仿真,成功构建模型并模拟多种
- 汽车碰撞仿真:利用有限元分析软件,对汽车在碰撞过程中的结构变形、能量吸收以及乘员安全进行仿真分析。通过模拟不同的碰撞工况,如正面碰撞、侧面碰撞等,工程师可以优化汽车的结构设计,提高车身的强度和安全性,为汽车的研发提供重要的参考依据。
作品类型 用于起重机操作员培训的仿真训练系统。 创作目的 通过沉浸式的操作体验和仿真模拟技术,为学员提供一个更加安全、高效、真实的起重作业培训平台,解决传统实车训练成本高、效率低、有安全隐患等问题。 模型组成 该系统以徐工16吨汽车起重机为仿真目标,集成了半实物仿真技术、三维建模技术、人工智能技术、实时交互技术等。通过逼真的三维模型和真实的物理数据建模,模拟出起重机在不同工况下的运行特性。 制作步骤 先对真实的徐工16吨汽车起重机进行详细的参数测量和结构分析,获取各项物理数据。然后利用三维建模技术构建起重机的外观和内部结构模型,再通过编程实现各种操作功能的模拟,如吊臂的伸缩、旋转,吊钩的升降等。同时,结合实时交互技术,让学员的操作能够实时反馈在模拟场景中。 作品展示 系统具备多种功能,可展示不同的训练场景和数据。有多种练习模式,如新手模式全程提供文字提示引导;训练模式学员可自由调整训练参数;考核模式严格计时计分,检验学员技能。系统还能实时显示起重机的各项状态参数和工作进度信息,包括主臂、副臂实时数据,支腿数据,实时工况,吊重表等。此外,可搭载自由度平台、振动电机等体感平台,增强学员的沉浸感。

