

0
1
2
3
4
5

我是程序员客栈的“小码”,一名在职研究生 ;
我毕业于中原工学院,担任过学校]的助教,担任过学校的技能培训管陪师 ;
熟练使用c++,stm32 ,java ,python ;
如果我能帮上您的忙,请点击“立即预约”或“发布需求”!
2021-11-06 -2022-11-20文都考研教师
主要讲授本科生考研课题,如数学,自动化,单片机,以及后期的复试准备,如嵌入式,c++
2017-11-09 - 2021-06-05中原工学院自动化本科

一、项目介绍 *小程序端: 1、小程序端管理员实现对信息模块的管理,包含课程、讲师、学员三类模块。 2、小程序端用户实现各类模块内容的浏览。 Web后台管理端: 1、Web端管理员实现对信息模块的管理; 2、Web端讲师实现对培训机构学员课程成绩打分等功能; 3、Web端学员实现对培训机构课程的报名、退选以及课程成绩查看等功能; 二、相关技术 1、*小程序(js、css前端基础):前端小程序页面; 2、SSM框架(Spring+SpringMVC+Mybatis):*小程序界面需要调用的接口以及后台的管理系统; 3、Maven:项目管理必备的技术; 4、Shiro框架:保证系统安全的框架; 5、Bootstrap前端框架:Web后台管理端的后台界面;
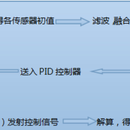
1、这个飞控是基于STM32,整合了MPU6050,即陀螺仪和重力加速计,但没有融合电子罗盘; 2、用写好的模拟i2c函数读取mpu6050,根据mpu6050手册的各寄存器地址,读取到了重力加速计和陀螺仪的各分量;传感器采样率设置为200Hz,这个值是因为我电调频率为200Hz,也就是说,我的程序循环一次0.005s,陀螺仪量程±2000°/s,加速计量程±2g, 量程越大,取值越不精确; 3、融合时,陀螺仪的积分运算很大程度上决定了飞行器的瞬时运动情况,而重力加速计通过长时间的累积不断矫正陀螺仪产生的误差,最终得到准确的机体姿态。这里我采用Madgwick提供的UpdateIMU算法来得到姿态角所对应的四元数,之后只需要经过简单运算便可转换为实时欧拉角。 4、由于简单的线性控制不可能满足四轴飞行器稳定系统,引入PID控制器来更好的纠正系统。 5、通过HC-06蓝牙模块接连到STM32串口1,再无线连接到控制端,获得控制端不断发送的数据包,并实时更新期望姿态角。

一、项目功能 1、可通过指纹模块增删查改家庭成员的指纹信息,增删查改是否成功的相关信息显示在OLED屏幕上 2、在指纹匹配过程中,如果采集的指纹与指纹模块库相匹配,OLED显示匹配成功,并转动步进电机一圈 3、可通过按键设定智能门锁密码,密码可设置为两个(密码六位),如果匹配两个中的一个成功,即可开锁,也可通过按键修改密码,所有的操作过程显示于OLED中 4、实现RFID与*解锁 5、扩展:虚位密码解锁 二、项目所用到的主要技术: 1、IIC协议、SPI协议、串口协议 2、外部flash驱动、SD卡驱动 3、FTAFS文件系统 4、RTC实时时钟 三、元件准备 1、步进电机(带驱动模块)型号:28BYJ4+ULN2003 2、4X4矩阵按键 3、指纹模块AS608(串口控制) 4、0.96寸OLED显示屏(IIC)型号:7针 5、蓝牙模块HC-05 6、主控芯片STM32F407ZGT6 型号:普中最小系统板 7、RFID RC522 射频模块(带一张卡片)


