


普通话母语水平
0
1
2
3
4
5
2021-09-01 -2025-06-22中国石油大学(华东)学生
中国石油大学(华东)软件工程专业21级学生(现已毕业),连续三年学分绩专业第一,曾获国家奖学金、数模国赛全国一等奖、数模美赛F奖等奖项,保研至中科大的控制科学与工程专业,研究方向为具身智能
2021-09-01 - 2025-06-22中国石油大学(华东)软件工程本科已认证
中国石油大学(华东)软件工程专业21级学生(现已毕业),连续三年学分绩专业第一,曾获国家奖学金、数模国赛全国一等奖、数模美赛F奖等奖项,保研至中科大的控制科学与工程专业,研究方向为具身智能
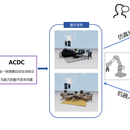
针对机器人策略在真实环境里学习成本高、难以覆盖复杂场景以及仿真与现实差距大这些挑战,提出一种基于“数字表亲”场景,结合大语言模型的机器人操作数据生成框架,用于合成高质量的机器人操作数据。首先,依靠ACDC框架自动生成和真实场景几何布局以及语义相似的多样化数字表亲仿真环境;接着,把任务指令、仿真状态输入到LLM中,生成一个层次化的技能树;而后,将任务树编译成一组预先定义好的运动原语,这些运动原语是基于OMPL运动规划与GraspNet抓取姿态估计来实现的;最后,在仿真环境中执行运动原语生成的轨迹数据,并检测任务是否成功。本文在两种条件下开展研究:一是仅使用真实数据,二是混合真实与生成的仿真数据,均采用ACT算法进行训练,并在原始真实场景以及物体空间分布具有不同程度变化的测试环境中评估其性能。实验结果表明,混合数据训练策略显著提升了模型在未见目标和变化环境下的泛化能力。本文方法降低了真实数据采集成本,提升了仿真数据的实用价值,为大规模、跨场景的机器人策略学习提供了高效可行的新途径。



