


0
1
2
3
4
5

1.熟悉 Python、C#,了解C++语言以及C语言;
2.熟悉opencv、线激光跟踪器、三维二维图像特征提取,了解PCL点云库和双目结构光相机;
3.熟悉工业机器人正逆运动学及unity3D,Opengl机器人运动仿真,机器人手眼标定等
2023-10-01 -2024-02-13科技公司研发工程师
1.搭建线激光和相机装置并且结合工业机器人进行图像处理; 2.二维三维图像处理; 3.机器人手眼标定; 4.机器人可视化系统仿真。
2022-09-01 -2023-03-30智能科技公司技术支持
1.基于 python 机器人应用编程包括 MODBUS 通信,socket 通信,异步并发。 2.通过 python 自动化机器人测试,unity3D机器人仿真。 3.DSP 嵌入式通信485、I2C、CAN 通信以及 DSP 移植学习。
2018-09-01 - 2022-07-01沈阳理工大学机械制造及其自动化本科
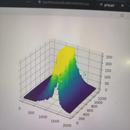
1.使用OPENCV进行相机标定程序开发,二维图像的处理; 2.熟悉计算机图像学和三维立体重建,掌握PCL库的应用; 3.可以定制开发图像处理软件。

1.opencascade CAD 模型参数化建模,方便模型归档与标准化; 2.opencascade CAD 开发交互式添加倒角功能可订制其它三维模型测量功能; 3.opencascade CAD 格式转换功能。
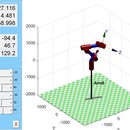
制作工业机器人数字孪生系统: 1.包括模型制作,可接收多品牌的机器人; 2.机器人正运动学逆运动学的C#实现; 3.Socket通信,协程等技术; 4.UI界面的美化; 5.作品图片展示的只是一个试用opengl复现的样例。



