





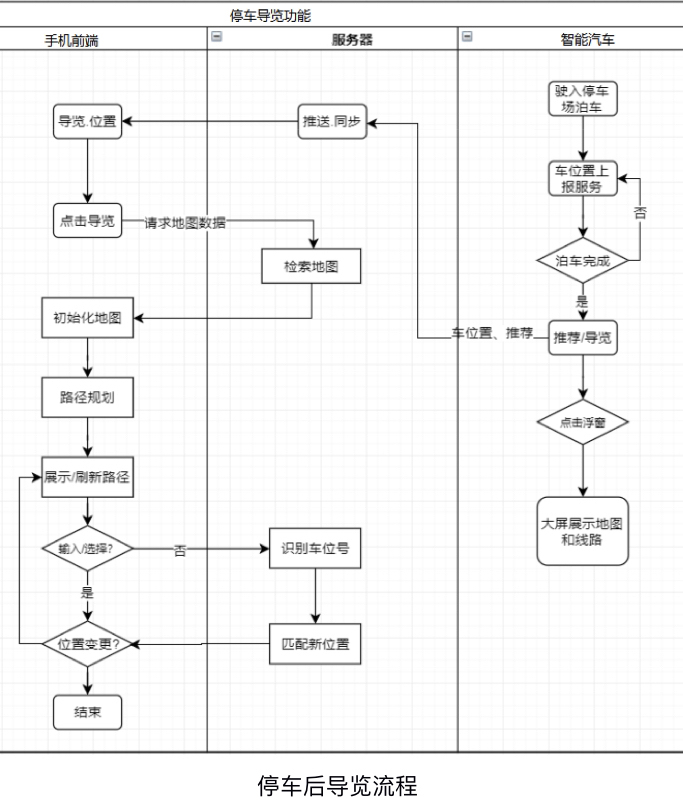
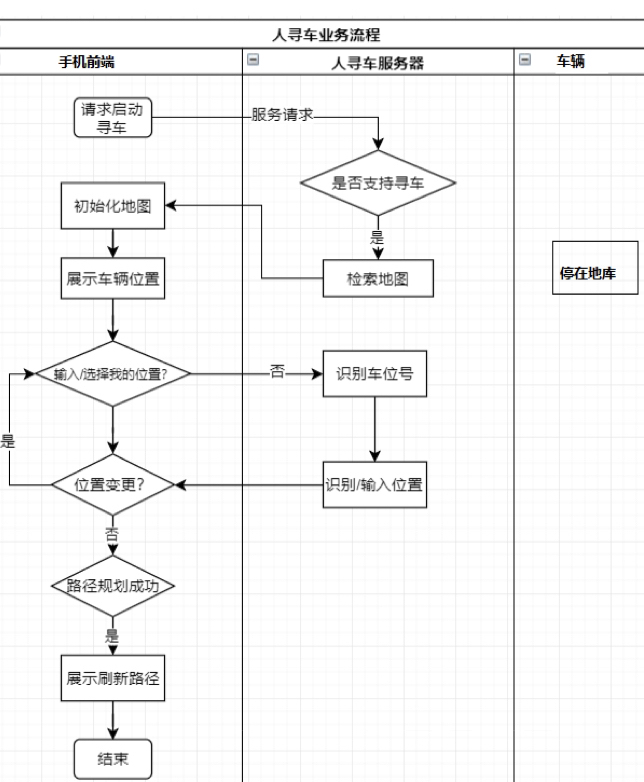
本文基于智能汽车高精度传感器自建地图的方式,实现快速的生产地库地图,在地库地图的基础上实现地库的导览功能。自动驾驶目前主要依赖于高精度地图和车的感知/识别能力,而自建地图则是反其道行之,复用车的感知/识别能力,采集到场景数据,通过算法融合拼接轨迹等手段,还原出真实场景的地图。自建地图主要包括停车位的特征信息、可能行路段的特征信息等,以及地图元素的关联关系。
在自建地图的基础上“人”通过辅助手段得知目前最近的标志物(车位/电梯等)的位置信息,即可定位人在地图上的坐标。在地图的基础上“车”通过传感器感知周围事物(车位/车道线/减速带/弯道等),作为所处空间的特征,与地图进行匹配,即可计算出车在地图上的坐标。人或车或物,所在地图的坐标,设置起点和终点,结合地图即可做路线规划,实现导览和导航。


点击空白处退出提示
评论