

0
1
2
3
4
5

2018-10-01 -2022-07-01东南大学机器人开发
双足机器人面向多种地形环境的稳定行走控制,基于pybullet的机器人仿真平台搭建以及机器人行走数据处理
2020-09-07 - 2023-06-19东南大学控制科学与工程硕士
2016-08-22 - 2020-06-30东南大学自动化本科
为提高机器人抓取自主性,开发了基于视觉导引的智能分拣机器人系统。 1、基于张正友标定法完成机械臂相机内参标定,完成机械臂手眼标定 2、完成机械臂相机的控制及其与本地客户端的TCP稳定通信 3、项目各功能模块的整合调试
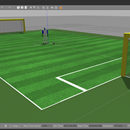
目前双足机器人在场地中的定位借助场地中的标志物实现,定位精度不足。本人负责工作如下: 1、基于视觉SLAM方法的双足机器人场地定位:利用RGB-D相机采集的图像信息,使用ORB-SLAM2实现场景建图和定位功能,完成ROS系统节点之间的通信功能 2、基于多传感器融合方法的双足机器人场地定位:在视觉SLAM结果的基础上,引入IMU采集的信息,通过扩展卡尔曼滤波器进行融合,实现更精确的场景定位功能
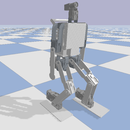
国内外RoboCup世界杯竞赛驱动,针对自研双足机器人平台,赋予其感知能力和运动能力,与同组别的类人机器人进行足球比赛。 1、基于ZMP和LQR最优控制实现双足机器人步态规划与运动控制,实现双足机器人稳定行走 2、基于单例模式的双足机器人软件控制框架:将机器人运动感知、视觉感知、配置参数等各部分进行模块化设计,各模块使用单例模式实现 3、PyBullet环境下搭建双足机器人仿真平台,实现双足机器人的运动能力

