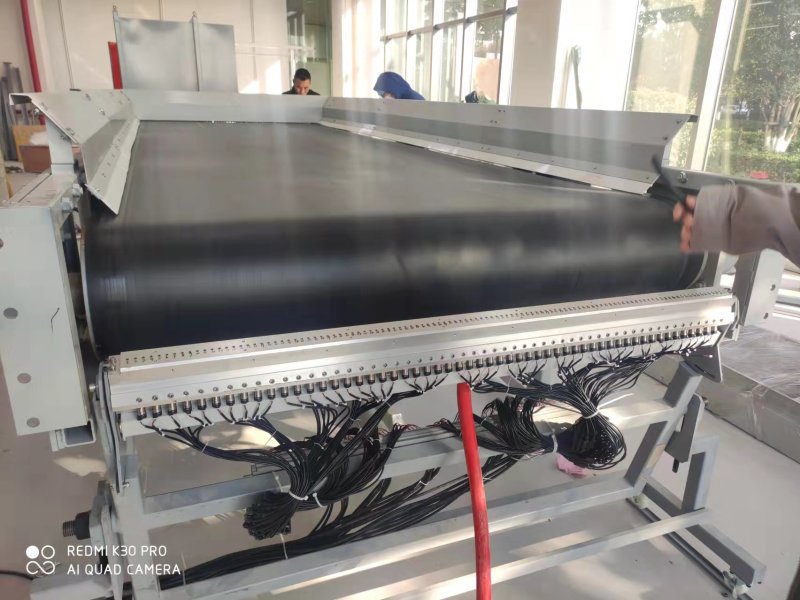
项目名称:实例分割与机器人结合智能抓取系统项目周期:2021.8-2022.1项目功能:使带有夹爪的机器人根据目标物的宽度距离张开同等宽度进行实时在线抓取算法方案:1.yolact++ 和Res2Net结构侦测目标2.提取mask掩码图3.利用opencv对mask掩码图进行处理,提取目标宽度信息个人工作:1.本次需要对数据进行像素级别的标注,根据数据特点制定标注方案 2.利用Res2Net结构替换yolact++主干网络对数据进行训练 3.由2D相机采集的图片传送给训练好的网络进行预测,提取预测结果的mask图 4.利用opencv对mask掩码图进行处理,得到对应目标的宽度信息 5.将模型转成pth模型,提交说明文件给部署工程师项目成果:能准确提取目标的中心坐标、种类及宽度信息发送给机器人,机器人的夹爪能根据目标的宽度张开同等距离实现实时在线抓取声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态








评论