


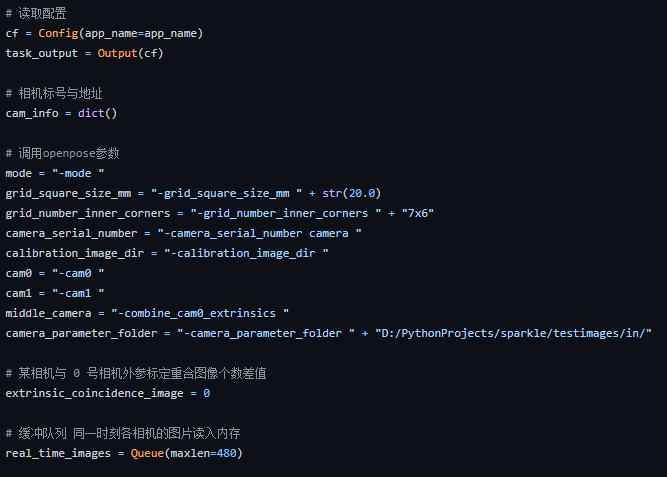
多相机读取图片,使用opencv标定得到相对位置,再用openpose提取2D关键点,pyopenpose三维重建。从rabbitmq拿到相机ID和图片路径,三维关键点也推到rabbitmq里面。

点击空白处退出提示



演示地址
https://github.com/toHandsomeMan/multi-camera-calibration
多相机读取图片,使用opencv标定得到相对位置,再用openpose提取2D关键点,pyopenpose三维重建。从rabbitmq拿到相机ID和图片路径,三维关键点也推到rabbitmq里面。
评论