

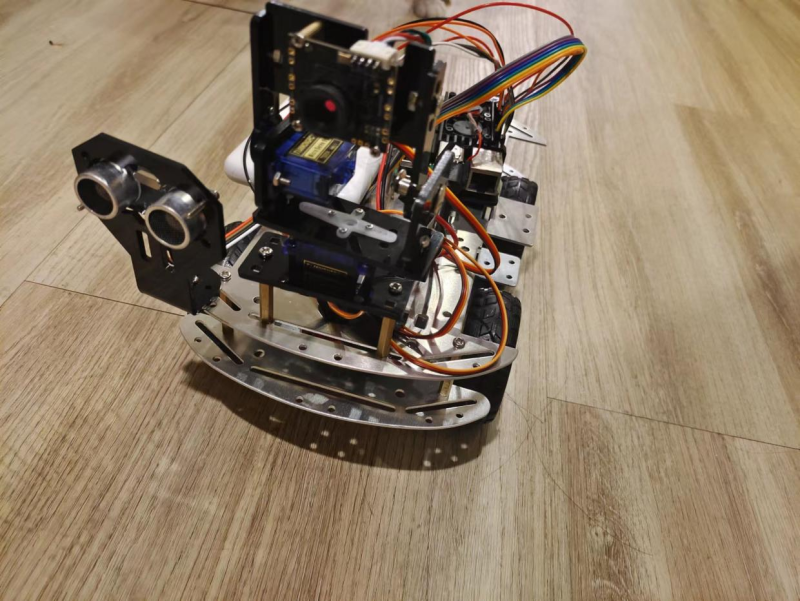
1.基于基于树莓派的自动寻道小车设计与实现的设计方案, 该设计中采用树莓派4B作为小车的控制模块,其主要负责线路控制、图像的采集、网络通信等功能。
2.该系统中采用摄像头进行图像采集,并通过无线网络通信将采集到的图像传给电脑客户端,通过电脑客户端进行进一步的图像处理实现自动寻迹功能。
3.该系统搭载二自由度的摄像模块。
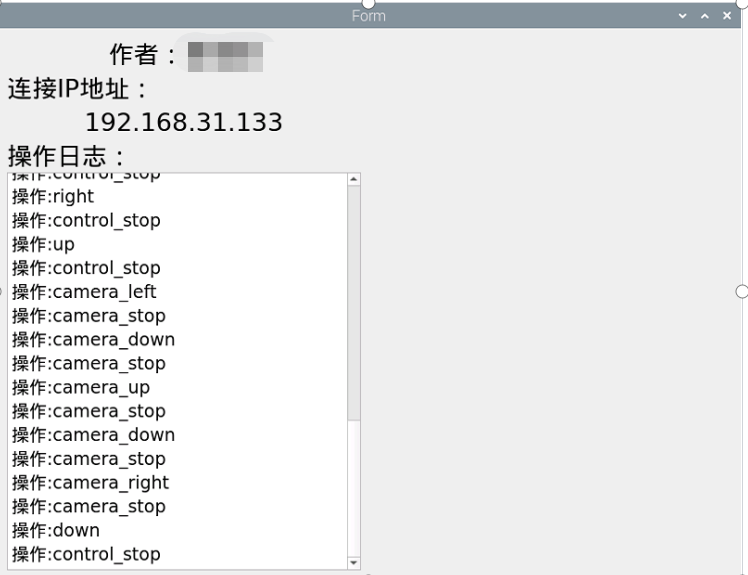
4.通过PyQt5进行客户端与服务端的界面开发。
5.该项目可在电脑客户端上部署YOLOV4目标检测算法进行定制目标检测

点击空白处退出提示



1.基于基于树莓派的自动寻道小车设计与实现的设计方案, 该设计中采用树莓派4B作为小车的控制模块,其主要负责线路控制、图像的采集、网络通信等功能。
2.该系统中采用摄像头进行图像采集,并通过无线网络通信将采集到的图像传给电脑客户端,通过电脑客户端进行进一步的图像处理实现自动寻迹功能。
3.该系统搭载二自由度的摄像模块。
4.通过PyQt5进行客户端与服务端的界面开发。
5.该项目可在电脑客户端上部署YOLOV4目标检测算法进行定制目标检测


评论