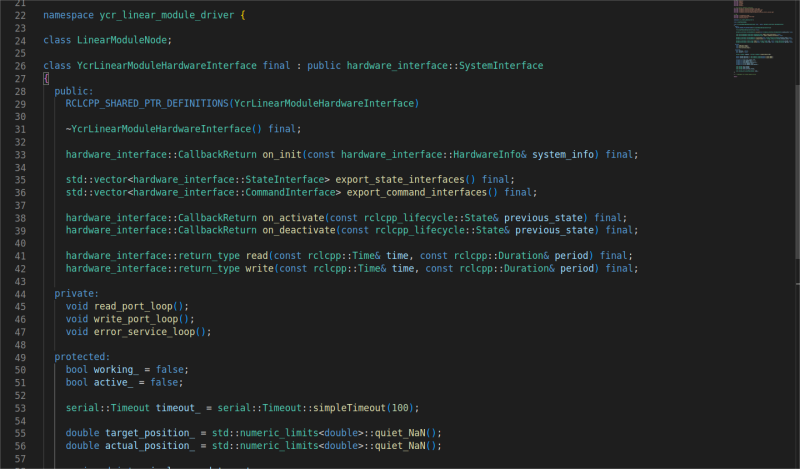
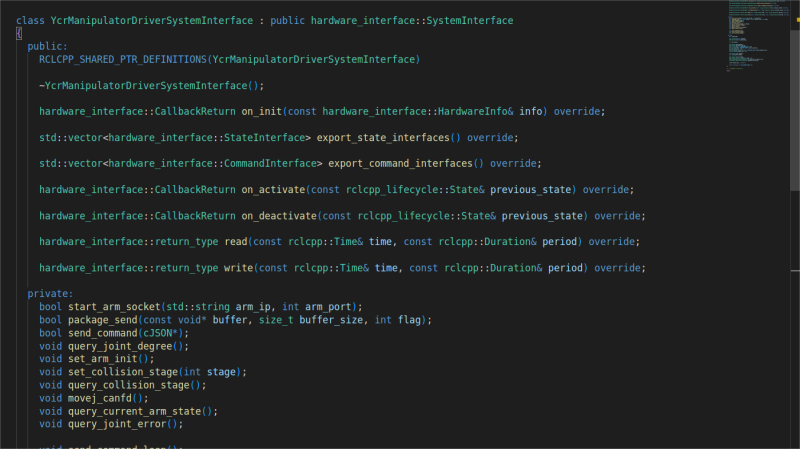
实现机械臂和直线运动模组的驱动模块,由于ros_control框架具备对实时性的支持,因此驱动代码需满足实时性要求,采用异步方式与硬件交互。
评论
您好 👋
我们能提供什么帮助?
向我们发送消息
常见问题、使用帮助、人工咨询等
使用微信扫一扫










评论