


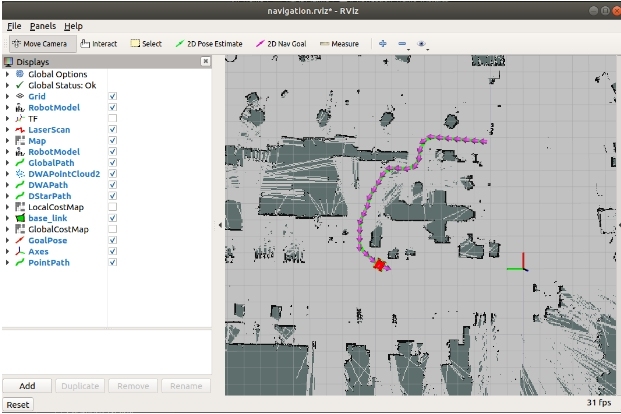
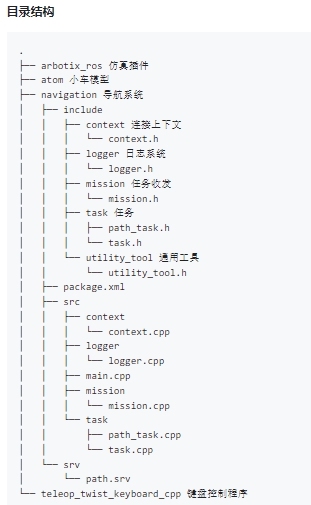
1、导航框架ROS封装,拥有日志系统和任务模块
2、四轮底盘机器人模型,使用arbotix仿真插件进行仿真
3、可以通过ROS遥控节点控制,仿真的当前位置获取
4、小车的状态信息通过topic发送出去
5、完善录制线路,发布线路,仿真验证

点击空白处退出提示



语言技术
C++开源地址
https://github.com/haicheng12/navigation_frame授权协议
BSD许可
1、导航框架ROS封装,拥有日志系统和任务模块
2、四轮底盘机器人模型,使用arbotix仿真插件进行仿真
3、可以通过ROS遥控节点控制,仿真的当前位置获取
4、小车的状态信息通过topic发送出去
5、完善录制线路,发布线路,仿真验证
评论