


0
1
2
3
4
5
我是程序员客栈的叔均,一名机器视觉工程师。
我负责过基于点云驱动的DD马达端面跳动测量以及基于机器视觉的旋转编码器缺陷检测的项目。
熟悉C++、C#、点云处理、图像处理、手眼标定等技术,如果你有机器视觉或者工业软件开发相关的需求,可联系我
APP扫码和程序员直接沟通
该用户选择隐藏工作经历信息,如需查看详细信息,可点击右上角“和TA聊一聊”查看
2020-09-16 - 2023-03-23东华大学机械工程硕士
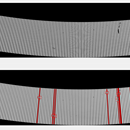
项目背景:检测旋转编码器缺陷的方式一般为人工检测,不仅效率低下,精度还得不到保证。为解决该问题,使用Python结合OpenCV库开发检测算法,并将算法集成到基于C#平台设计的软件中。 项目职责:1.设计一种基于形态学的分割算法对图像进行分割,该算法对编码器型号以及噪声具有较强的鲁棒性。2.将编码器缺陷分为两大类:断裂(孔洞)以及镂空,对这两种缺陷设计不同的算法进行检测。3.开发2D相机交互模块,并将其集成到C#开发的软件中。 项目成果:1.目前该项目已落地,在工厂中使用情况良好。2.熟练使用Python+OpenCV设计图像处理算法
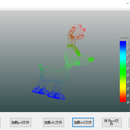
对于3D点云处理来说,Pcl点云库必不可少。如果说OpenCV是2D信息获取与处理的结晶,那么Pcl就在3D信息获取与处理上具有同等地位。但不同于opencv拥有众多.NET包装,如OpencvSharp、emgucv等,目前并没有可靠的Pcl的.NET包装(PclSharp已经好几年没有维护,而现行版本又bug太多。),这不利于.NET用户开发3D点云的相关应用。 为解决这个问题,开发了Pcl点云库的.NET包装:PclCSharp。该库封装的是Pcl1.8.1版本,主要集成了pcl库的点云处理功能,但没有封装点云可视化功能。因为在pcl中,点云可视化是靠vtk实现的,而vtk有C#的版本。用户可以使用vtk可视化点云,使用该库对点云进行处理。目前该库仅支持Windows10 X64平台
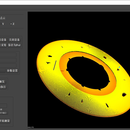
项目背景:为解决DD马达端面跳动测量效率低下、精度不高的问题,使用3D视觉技术,结合Qt、Visual Studio、Pcl点云库开发DD马达端面跳动测量软件。 项目职责:1.设计一种基于曲率和密度的点云分割算法对点云进行分割。2.马达端面可能会有倾斜,设计点云平面拟合算法修正倾斜误差。3. 使用C++和C#混合编程,开发Pcl点云库的C#版本,并封装成dll供C#开发人员用。4.使用C++开发3D相机交互模块,并将其集成到软件中。5.使用Sqlite开发数据管理模块。 项目成果:1.Qt版软件已开发完毕,目前正在测试。2. 修复Pcl库addText3D函数与QVTKWidget控件交互的bug,具体见https://github.com/PointCloudLibrary/pcl/pull/5054,已被合并到master节点。3.开发Pcl库的C#版本,该库已被其他用户使用。地址https://github.com/booksuper/PclCSharp.git 。


