





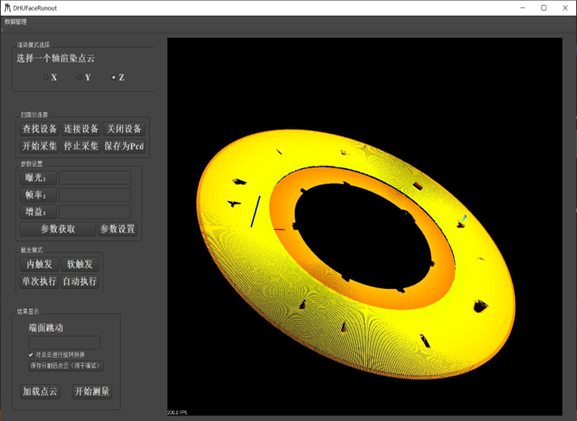
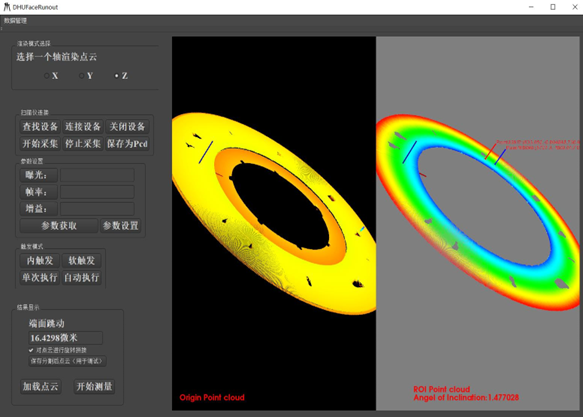
项目背景:为解决DD马达端面跳动测量效率低下、精度不高的问题,使用3D视觉技术,结合Qt、Visual Studio、Pcl点云库开发DD马达端面跳动测量软件。
项目职责:1.设计一种基于曲率和密度的点云分割算法对点云进行分割。2.马达端面可能会有倾斜,设计点云平面拟合算法修正倾斜误差。3. 使用C++和C#混合编程,开发Pcl点云库的C#版本,并封装成dll供C#开发人员用。4.使用C++开发3D相机交互模块,并将其集成到软件中。5.使用Sqlite开发数据管理模块。
项目成果:1.Qt版软件已开发完毕,目前正在测试。2. 修复Pcl库addText3D函数与QVTKWidget控件交互的bug,具体见https://github.com/PointCloudLibrary/pcl/pull/5054,已被合并到master节点。3.开发Pcl库的C#版本,该库已被其他用户使用。地址https://github.com/booksuper/PclCSharp.git 。

点击空白处退出提示
评论