演示地址http://www.zb-fa.com
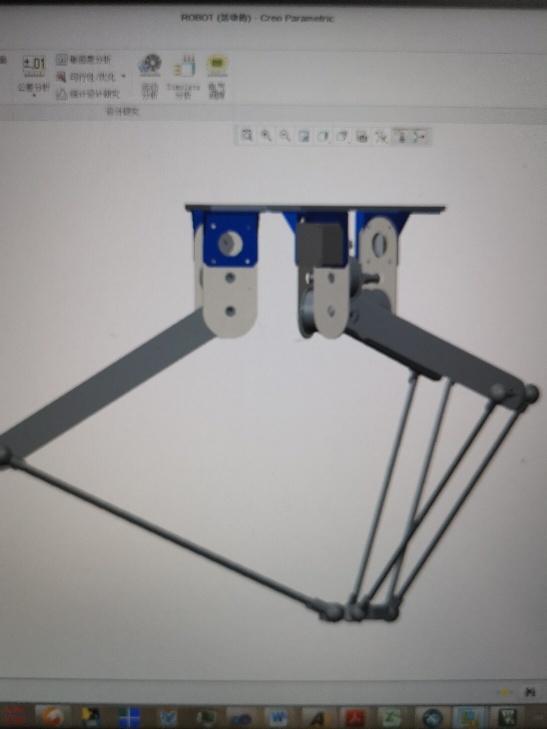
delta机器人可以通过视觉引导进行高速抓取分拣等工作,机器人通过c#上位机与ARMFPGA下位机运动控制系统协作,进行运动学正逆解计算,驱动机器人工作。
评论







评论