


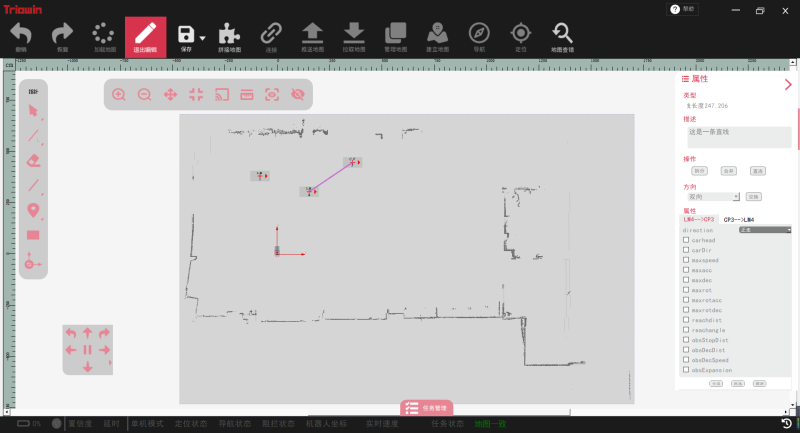
1:自研可视化的操作机器人的上位机软件,包括二维地图的展示,修改,任务链的下发,属性页的展示等
2:使用类似MVVM框架进行构建,期间使用策略模式加工厂模式来进行解偶等设计,永本地SQlite数据库进行存储通讯协议
3:期间用线程的三种不同模式(重写QThread;继承Object,movetothread;线程高级类QtConcurrent)来进行数据的处理

点击空白处退出提示



1:自研可视化的操作机器人的上位机软件,包括二维地图的展示,修改,任务链的下发,属性页的展示等
2:使用类似MVVM框架进行构建,期间使用策略模式加工厂模式来进行解偶等设计,永本地SQlite数据库进行存储通讯协议
3:期间用线程的三种不同模式(重写QThread;继承Object,movetothread;线程高级类QtConcurrent)来进行数据的处理

评论