


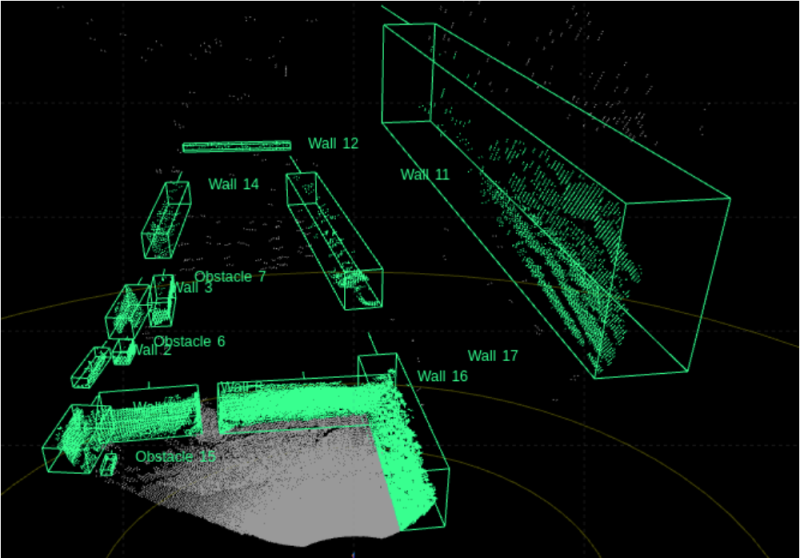
使用Pointpillar完成对矿区无人驾驶的导航
使用ROS操作数据,实现数据与模型的通信;重写Cuda算子,对数据流转进行优化;使用核函数实现Cuda多线程并行编程。
在Nvidia Xavier上部署深度学习模型,使用TensorRT实现加速。

点击空白处退出提示



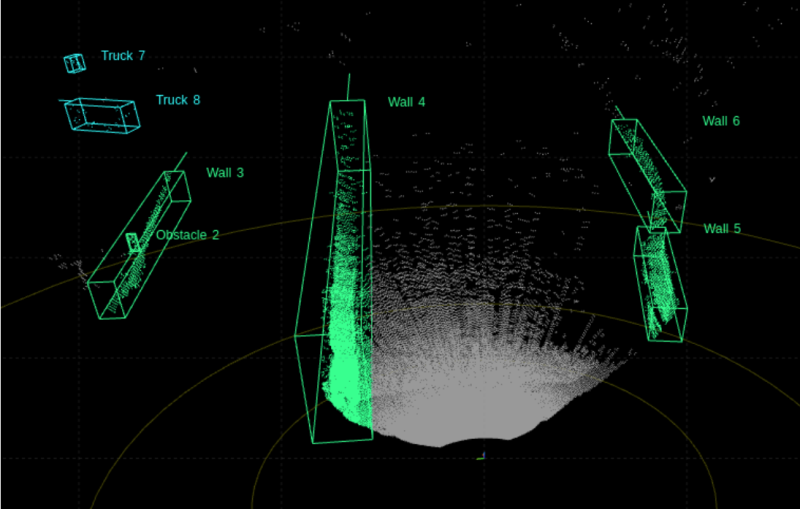
使用Pointpillar完成对矿区无人驾驶的导航
使用ROS操作数据,实现数据与模型的通信;重写Cuda算子,对数据流转进行优化;使用核函数实现Cuda多线程并行编程。
在Nvidia Xavier上部署深度学习模型,使用TensorRT实现加速。
评论