





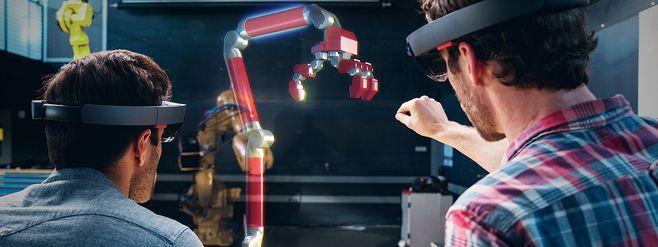
使用HoloLens通过MR应用技术控制真实机械臂的动作,使机械臂运动更加直观易懂收集真实机械臂硬件运行信息和损耗程度使使用者更加直观了解机械臂的构造及工作原理。搭建客户端逻辑,基于UWP的配置文件的写路径及权限研究,vuforia识别定位SDK接入hololens保证正常运行优化HoloLens运行速率,提高fps,使用Vuforia 定位hologram,使用socket技术同步数据使真实机械臂按照相同路径运行,通过自定义安全范围过滤危险点,使用HoloLens手势识别进行空间路径节点的拖拽移动位置,使用spatial mapping及world anchor功能使HoloLens能始终将hologram定位在正确的位置;


点击空白处退出提示
评论