





在自研的智能车上部署激光雷达,惯导与相机等多种传感器,实现智能车从 A 到 B 的自主导航功能
• 设计四轮驱动智能车由期望线速度与角速度分配到四轮轮速量的算法,使智能车运动更加平滑
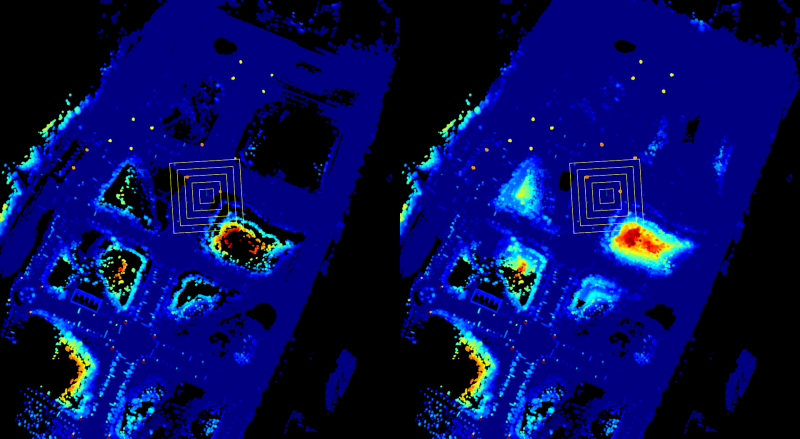
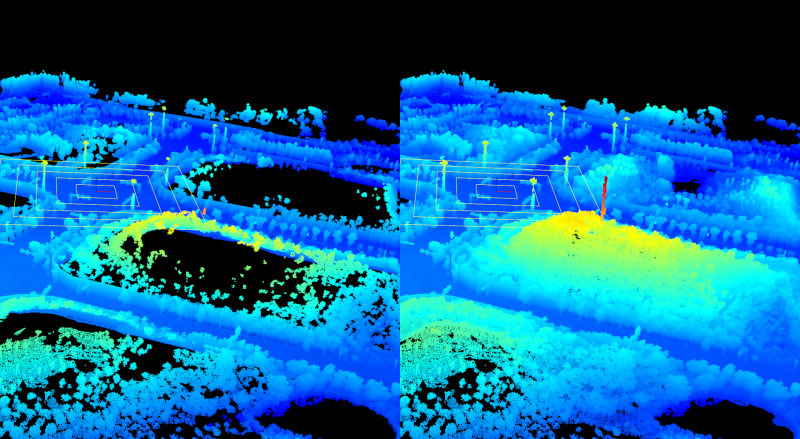
• VelodyneHDL32 雷达与 MTI300 AHRS 惯导部署到智能车,获取点云与惯导数据, ROS 消息发出
• 应用 Cartographer 进行实验车库环境的二维离线建图,基于此离线地图用 Cartographer在线定位
• 应用 move_base 功能包进行智能车全局与局部路径规划实现导航功能

点击空白处退出提示
评论