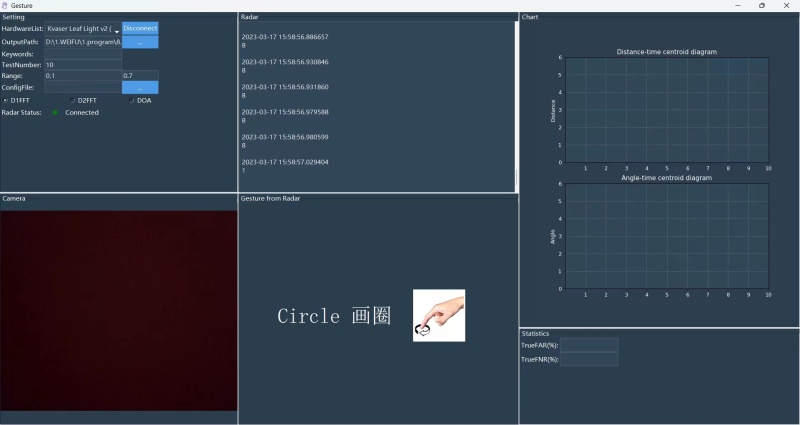
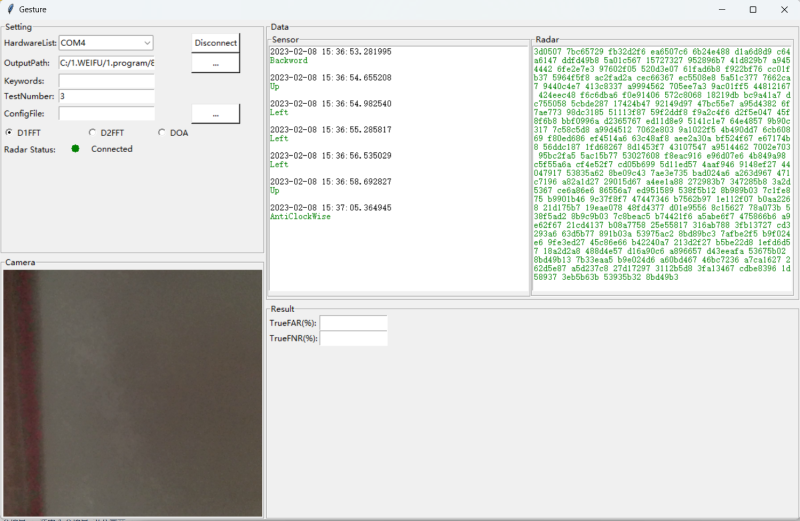
通过UDP接入传感器数据,通过CAN/串口通信接入雷达数据,通过opencv接入摄像头数据,实时通信并解析报文,显示手势,统计雷达的误报率和漏报率。
评论
您好 👋
我们能提供什么帮助?
向我们发送消息
常见问题、使用帮助、人工咨询等
使用微信扫一扫










评论