





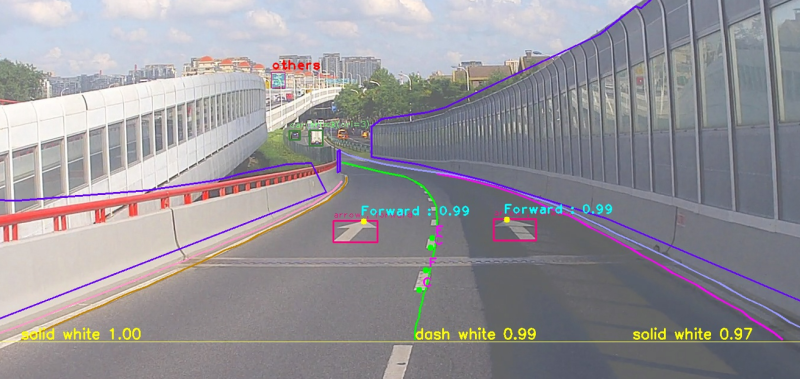
该项目的技术栈按顺序为数据采集、模型训练、模型后处理(视觉)、视觉信息后处理(路面),然后是测试并发布产品。该产品的客户为车企,交付无人驾驶的视觉识别模块。
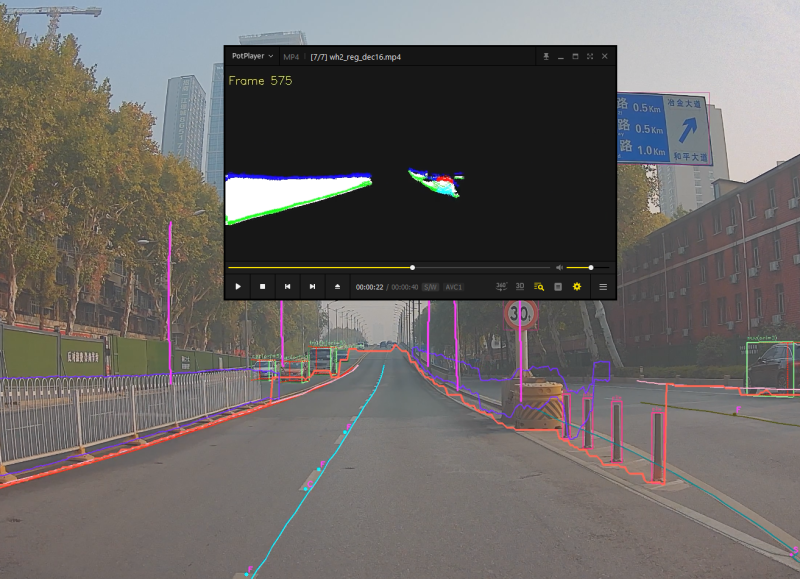
本人负责的部分为路面上的栅栏信息的模型后处理,要求其在非特殊场景下无漏检、无误检,识别标定边缘清晰,计算复杂度低(车载单片机处理单帧图片5ms)。
开发过程中,会遇到前后前后技术栈的一些协调困难,比如后续技术栈要求处理速度,而前序技术栈交付到本人的模型又在某些场景下清晰度不高,图像噪点较高,增加了后处理的难度。每一版本的模型的优缺点各不相同,后处理的针对性解决方案也要跟着模型的版本而开发不同的对策。


点击空白处退出提示
评论