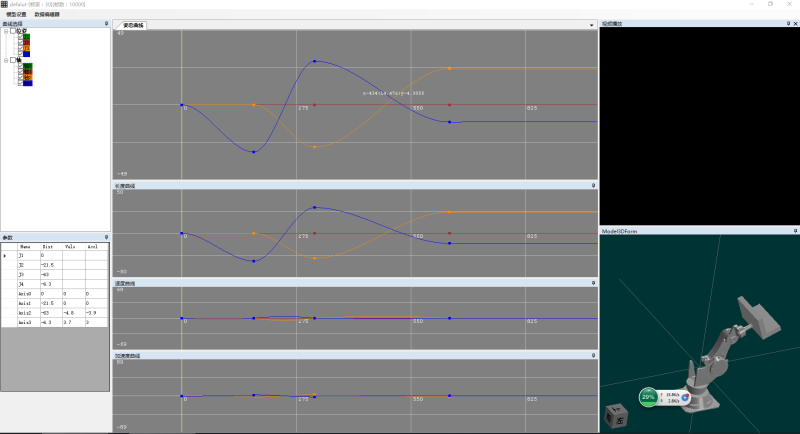
用于根据多自由度并联平台、串联机械臂配合影片完成仿真动作,需根据设备模型建立不同的运动学模型,实现运动学正逆解,最终生成设备各个关节伺服电机的运动曲线。
评论
您好 👋
我们能提供什么帮助?
向我们发送消息
常见问题、使用帮助、人工咨询等
使用微信扫一扫










评论