




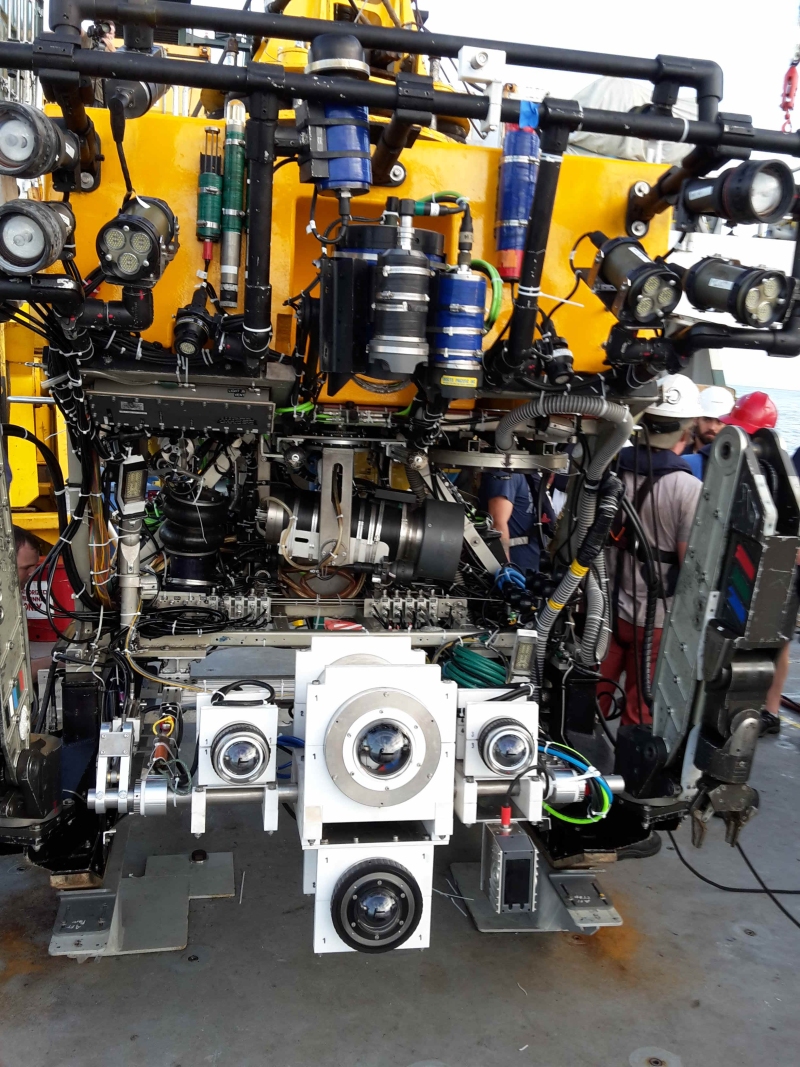
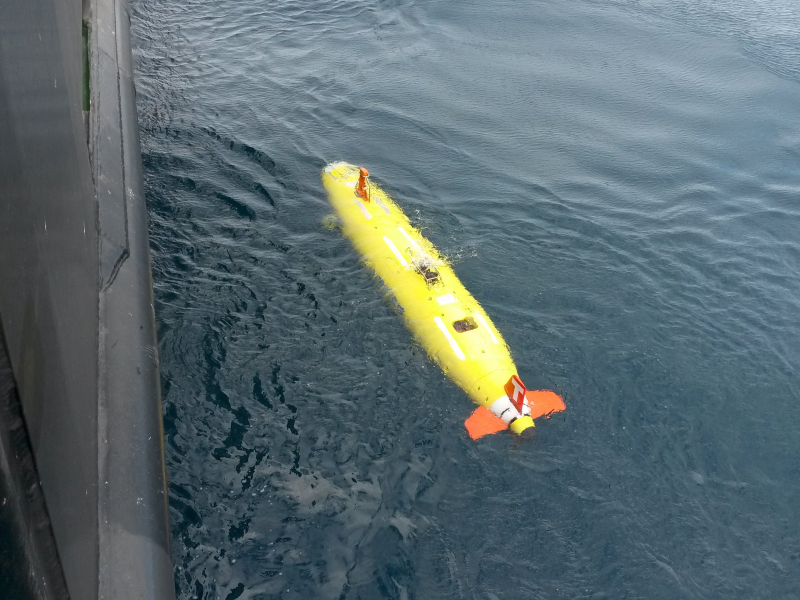
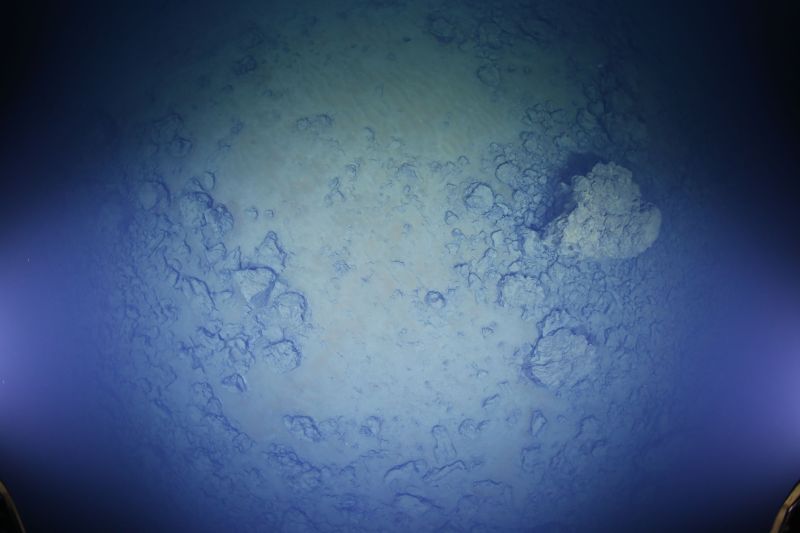
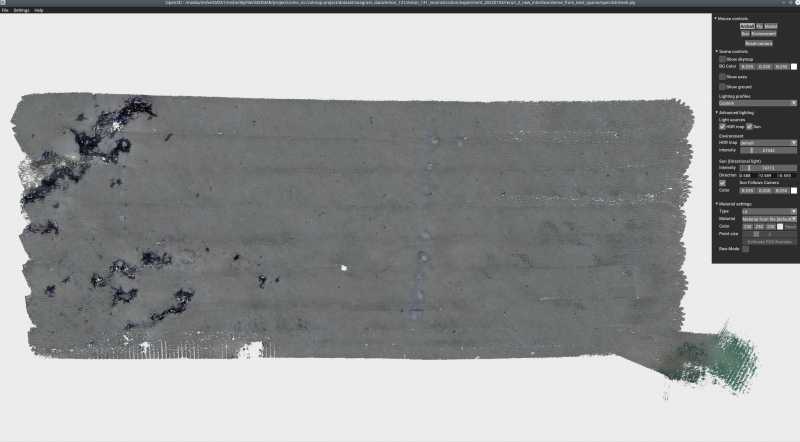
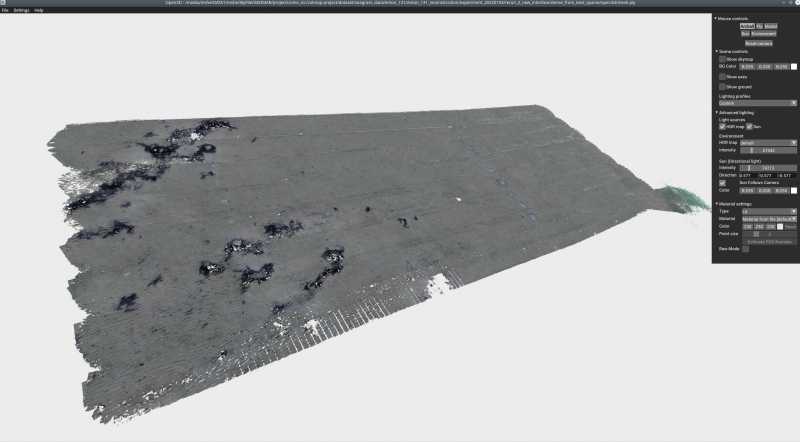
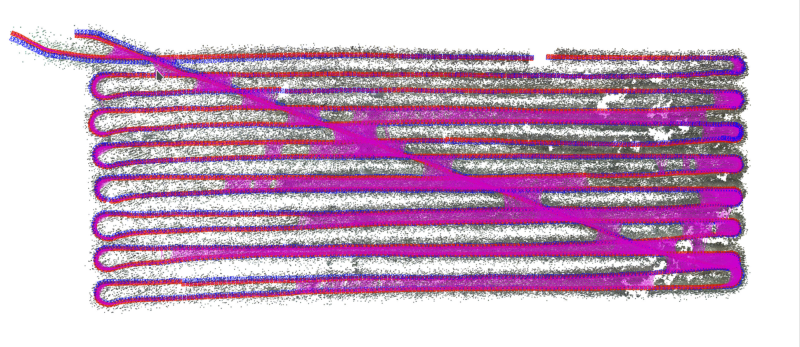
该项目为我目前的主要研究课题,使用超过2000张高清海底图像进行三维重建(Structure from Motion, SfM),图像通过深海机器人的视觉系统来获取(有自主导航的机器人AUV,有远程线控的机器人ROV,但是我们不研究机器人的开发和控制,机器人一般是买来的,并有专门的机器人团队做控制,我们只使用机器人得到的数据进行算法研究)。深海机器人一般配备着多个传感器以及高精度IMU,因此可获取粗略的6个自由度的导航数据。纯粹的视觉三维重建效果并不鲁棒,因此该课题主要研究如何融合导航数据以提高三维重建的精度。目前暂并无发表论文。


点击空白处退出提示
评论