


针对室内机器人的导航问题,研究对室内显著目标以及通用目标的分割模型
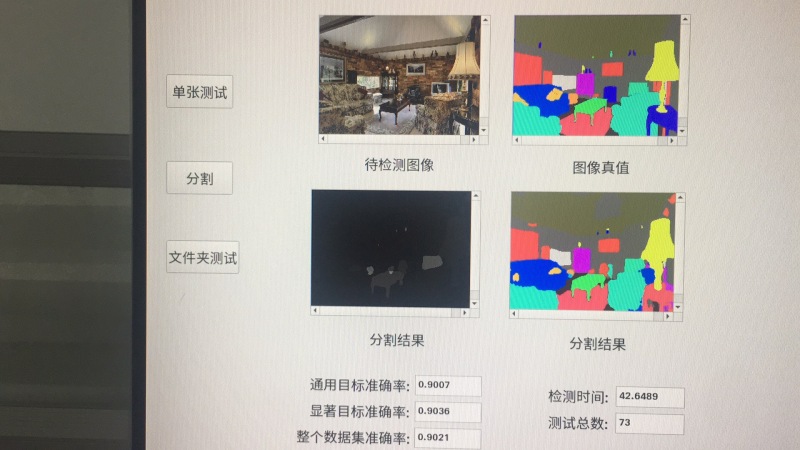
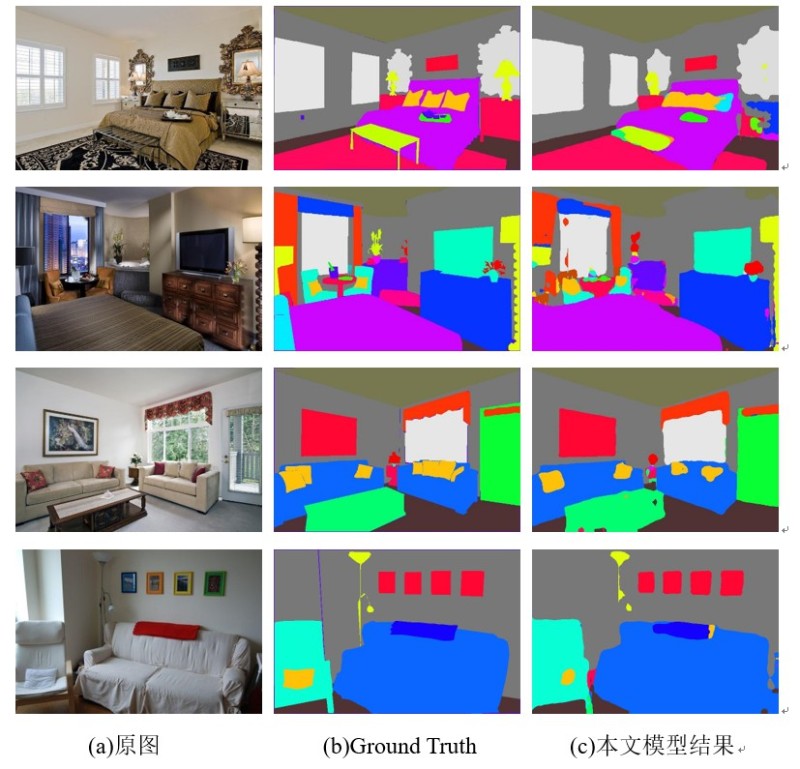
主要工作:负责室内场景分割模型的训练,同时利用pyqt开发图形界面,完成对室内场景分割,具体模型包括unet,u2net,unet++以及deeplabV3
研究成果:通用目标(墙,地面,天花板)以及显著目标(沙发,床,门,窗帘,电视)的识别准确率均达到90%

点击空白处退出提示



针对室内机器人的导航问题,研究对室内显著目标以及通用目标的分割模型
主要工作:负责室内场景分割模型的训练,同时利用pyqt开发图形界面,完成对室内场景分割,具体模型包括unet,u2net,unet++以及deeplabV3
研究成果:通用目标(墙,地面,天花板)以及显著目标(沙发,床,门,窗帘,电视)的识别准确率均达到90%

评论