


获取USB相机或者Basler相机;
工业相机的内参标定;
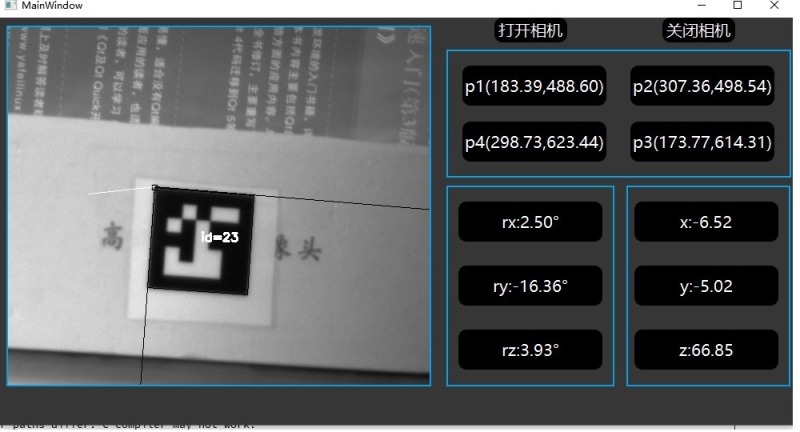
基于ARUCO靶标的位姿计算并测量;
在目标靶标距离相机约60cm处静止测量得到的数据,以及当前测量的位移矩阵和旋转矩阵的静止的误差。其中x与y测量的误差在±0.005cm,z轴在该位置的误差在±0.045cm。

点击空白处退出提示



获取USB相机或者Basler相机;
工业相机的内参标定;
基于ARUCO靶标的位姿计算并测量;
在目标靶标距离相机约60cm处静止测量得到的数据,以及当前测量的位移矩阵和旋转矩阵的静止的误差。其中x与y测量的误差在±0.005cm,z轴在该位置的误差在±0.045cm。

评论