





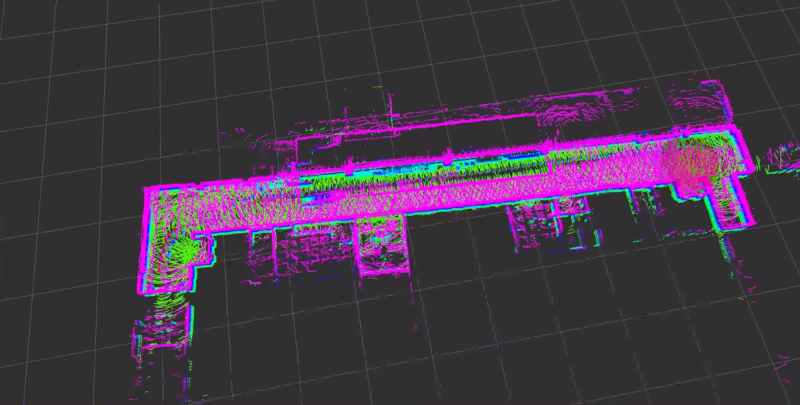
1.hdl_graph_slam是一套3D激光SLAM系统,可融合gps、imu、lidar三种传感器,同时具有闭环检测功能,资源消耗低,代码框架简洁程序易读等优势。2.hdl_graph_slam建图系统的功能主要分为四个部分:地面平面检测,点云滤波,前端里程计和后端全局匹配及图优化。其中前端里程计和后端全局匹配及图优化为建图系统的核心功能部分,前端系统中里程计功能核心在于精度性能达到最佳,后端系统包含提取关键帧生成里程计约束边,读取gps/imu信息生成约束边,读取地面检测参数生成平面约束边,闭环检测生成有效闭环约束边,将以上边(Edge)统一加入Graph。
3.hdl_localization定位系统是基于UKF进行位姿更新迭代的,在没有接入IMU/轮式里程计等信息下UKF中的预测过程是匀速处理,更新过程是通过NDT匹配算法将当前激光数据与地图进行匹配得到观测值来进行校正处理

点击空白处退出提示
评论