


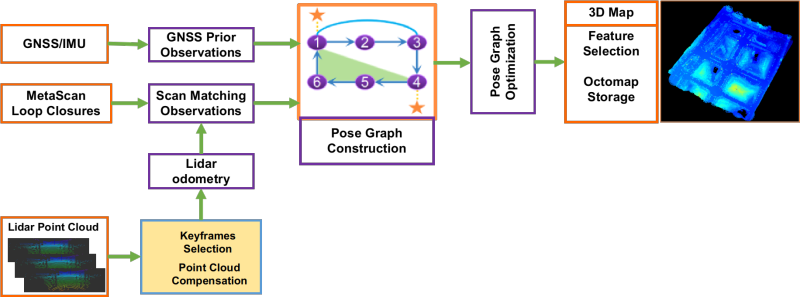
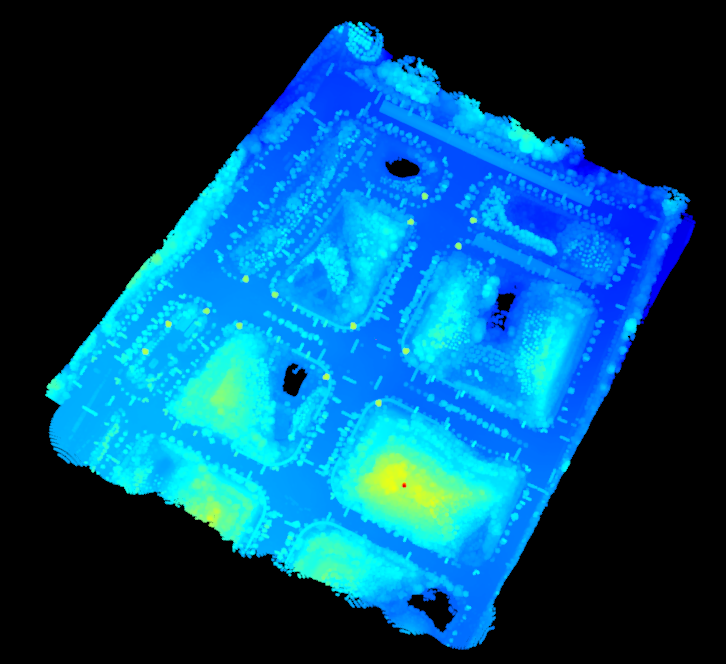
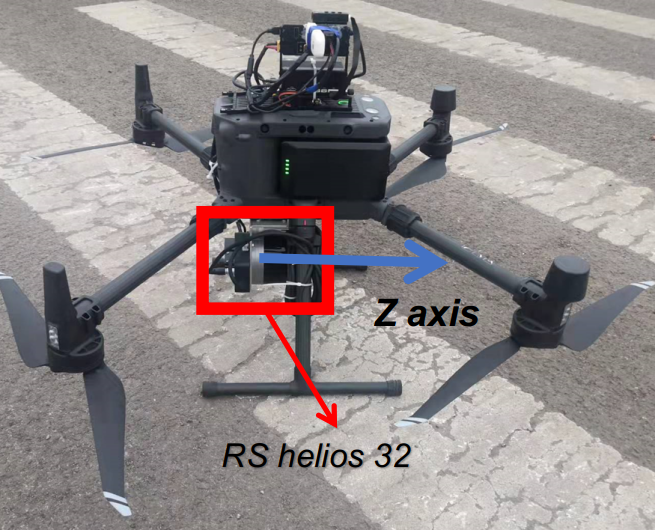
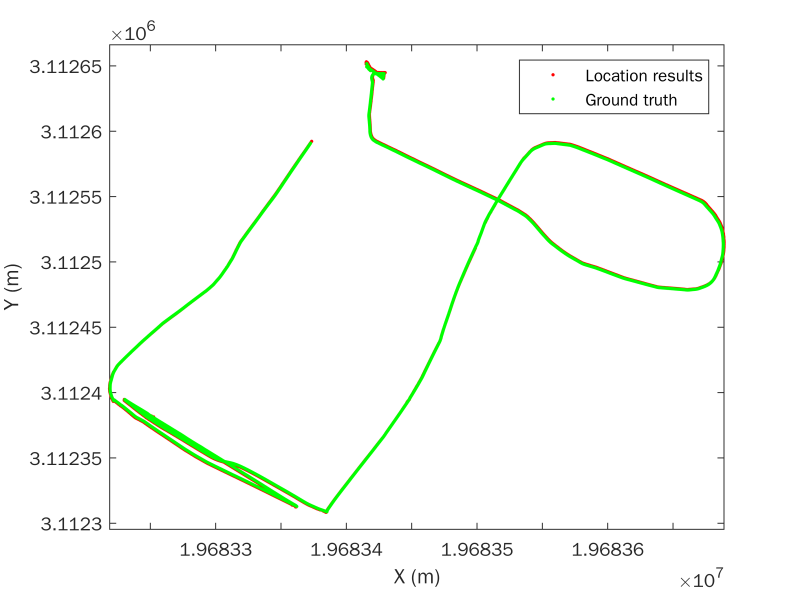
文章主要研究 GNSS 拒止环境下无人机的定位问题,应用 DJI M300RTK 搭载激光雷达进行离线高精
度点云地图构建,再基于点云地图进行 GNSS 拒止环境定位。
• 应用多帧融合形成 MetaScan 进行点云子图间的匹配,解决闭环关键帧点云数据量少的问题
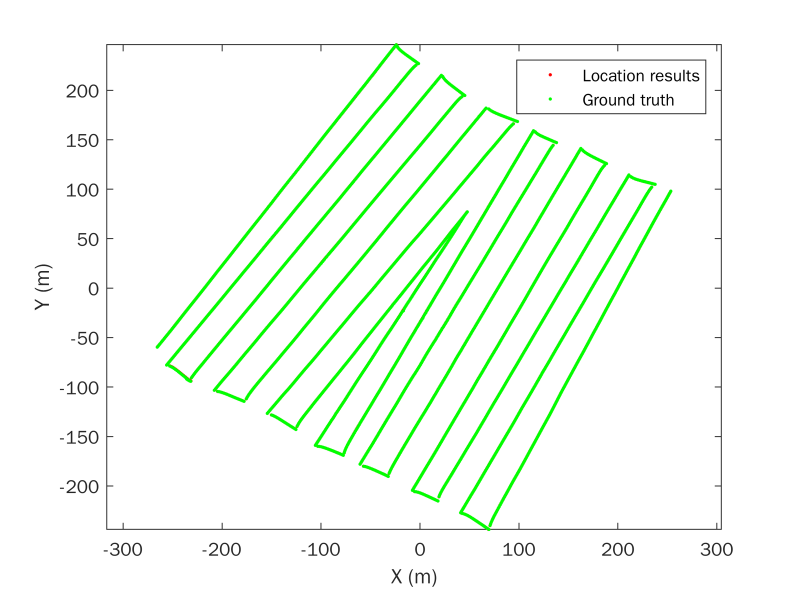
• 应用开源 LIOSAM 雷达惯性里程计,实现无人机 GNSS 拒止环境定位
• 无人机局部子图与全局地图匹配时应用 LOAM,仅根据点到面的残差得到优化位姿提供匹配效果

点击空白处退出提示



行业分类
人工智能
文章主要研究 GNSS 拒止环境下无人机的定位问题,应用 DJI M300RTK 搭载激光雷达进行离线高精
度点云地图构建,再基于点云地图进行 GNSS 拒止环境定位。
• 应用多帧融合形成 MetaScan 进行点云子图间的匹配,解决闭环关键帧点云数据量少的问题
• 应用开源 LIOSAM 雷达惯性里程计,实现无人机 GNSS 拒止环境定位
• 无人机局部子图与全局地图匹配时应用 LOAM,仅根据点到面的残差得到优化位姿提供匹配效果
评论