





我的项目旨在完善机器人点云数据处理和可视化功能。具体而言,我实现了以下主要功能:
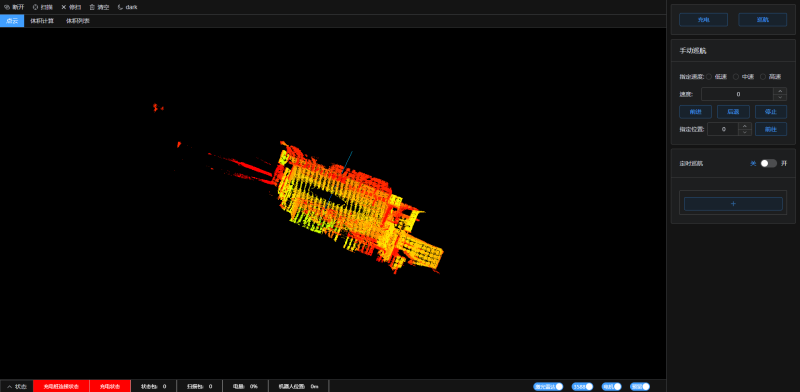
连接ROSBridge:我使用ROSBridge技术与机器人建立连接,实时接收机器人的点云数据。这样,我可以获取机器人从传感器获取的三维点云信息。
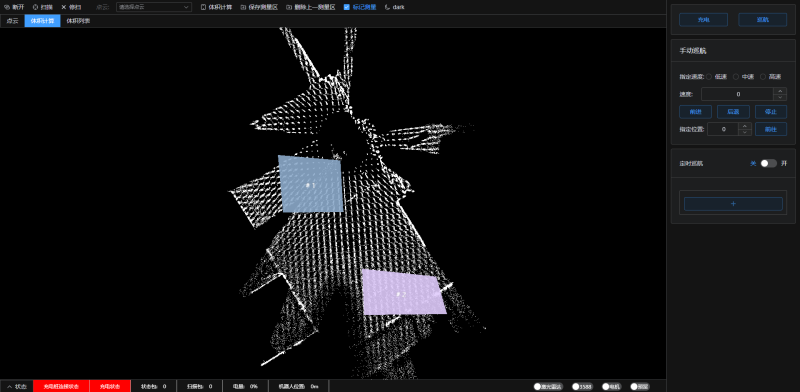
点云数据渲染:我通过使用适当的渲染技术,将接收到的点云数据以直观的方式展示出来。这样,用户可以更好地理解机器人所看到的环境,并进行进一步的分析和决策。
保存PCD功能:为了方便后续的数据处理和分析,我提供了PCD(Point Cloud Data)保存功能。用户可以将当前接收到的点云数据保存为PCD文件格式,以备将来使用。
区域标记:我还支持对点云数据中的特定区域进行标记。用户可以通过交互操作,在点云图像上绘制感兴趣的区域。这对于识别和分割特定物体或区域非常有用。
体积计算:基于标记的区域,我能够计算该区域的体积。这使用户能够快速准确地测量各种不规则物体或区域的体积,节省时间和精力。
总之,通过连接ROSBridge、实时渲染点云数据、保存PCD文件、区域标记和体积计算等功能,我的项目提供了一个完整的解决方案,用于处理和分析机器人的点云数据。这将有助于机器人视觉感知、环境建图、目标识别等领域的研究和应用。


点击空白处退出提示
评论