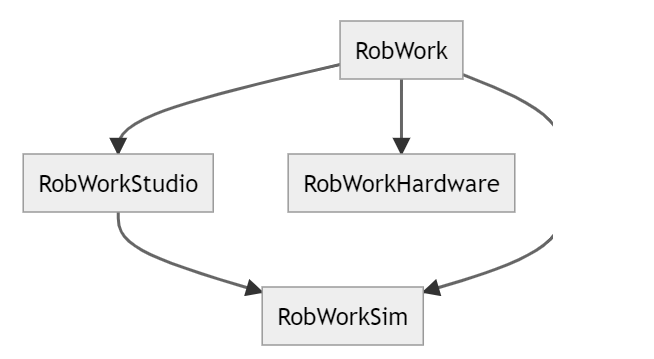
RobWork是用于模拟和控制机器人系统的C++库的集合。RobWork用于研究和教育以及实际的机器人应用。特点包括:各种类型的工业机械手、串行、树形和并行结构的运动学建模。通用路径规划、路径优化、碰撞检测和逆运动学算法。机械手、控制器和传感器的运动学和动态仿真。用于模拟吸盘、平行和灵巧夹具的插件。用于集成用户算法和可视化的简单且可扩展的GUI和插件系统。基于SWIG的脚本接口,可将RobWork扩展到多种脚本语言,例如Python、Lua和Java。除了核心部分,RobWork还有许多附加组件,包括RobWorkStudio,它提供了一个图形用户界面。RobWorkSim用于动态模拟。RobWorkHardware是连接到RobWork的硬件驱动程序的集合。RobWork的目标受众是:需要实验机器人通用框架的研究人员想要尝试机器人概念的学生机器人应用的实施者RobWork项目由几个子项目组成。它们都有自己的CMake构建结构,可以一起构建,也可以单独构建。RobWork项目之间的依赖关系如图:
声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态







评论