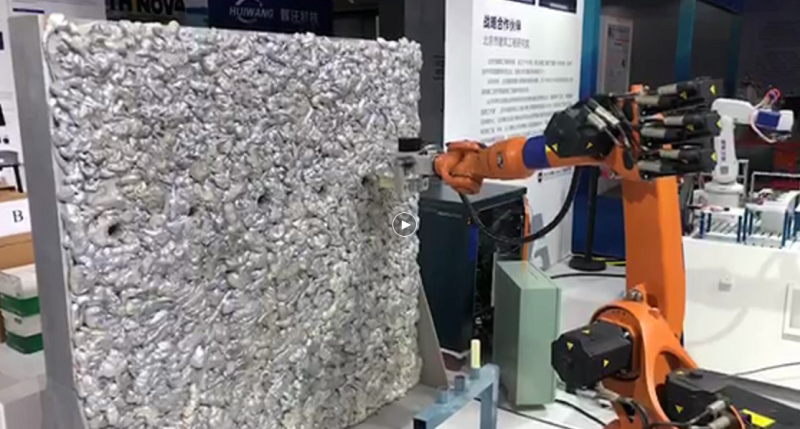
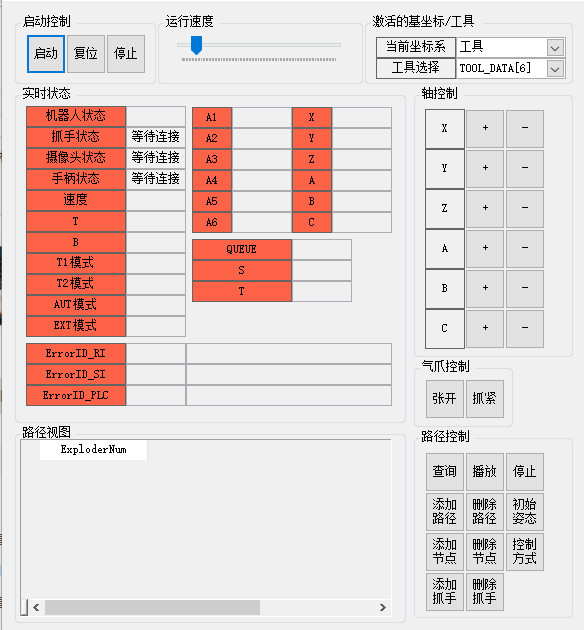
通过视觉识别物体,机械臂自动移动, c# 通过 axmation借口与kuka机器人通信,在通过tcp与抓手和视觉模块通信,实现视觉模块识别物体将三维空间信息传输给上位机,在通过上位机传输给kuka机械臂 实现运动抓去功能







评论