


基于恩智浦K60 ARM内核芯片,C语言开发
摄像头、电磁传感器对赛道循迹、赛道特殊元素的识别处理和路径规划的算法编写,稳定速度达到2.5m/s
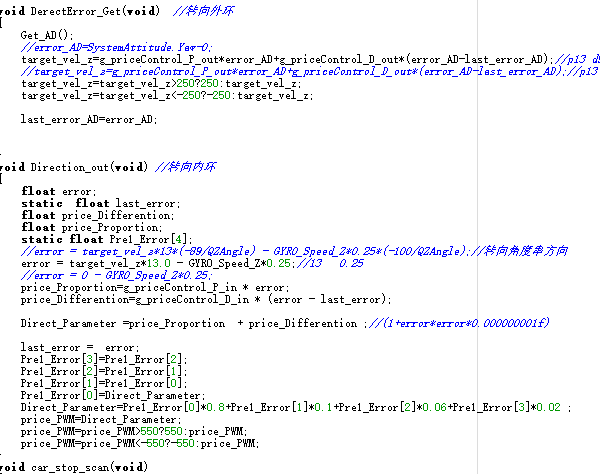
两轮直立车姿态、速度控制串级PID算法编写及参数整定,陀螺仪四元数角度解算稳定性调优
小车主控、驱动PCB单板 layout设计打样

点击空白处退出提示



基于恩智浦K60 ARM内核芯片,C语言开发
摄像头、电磁传感器对赛道循迹、赛道特殊元素的识别处理和路径规划的算法编写,稳定速度达到2.5m/s
两轮直立车姿态、速度控制串级PID算法编写及参数整定,陀螺仪四元数角度解算稳定性调优
小车主控、驱动PCB单板 layout设计打样

评论