





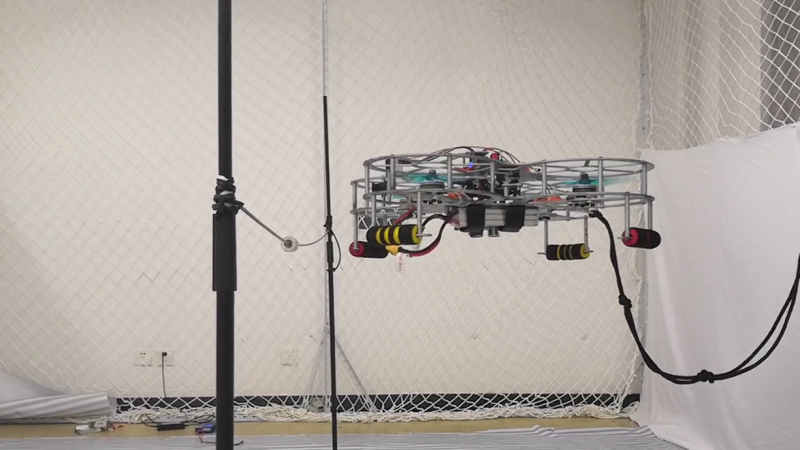
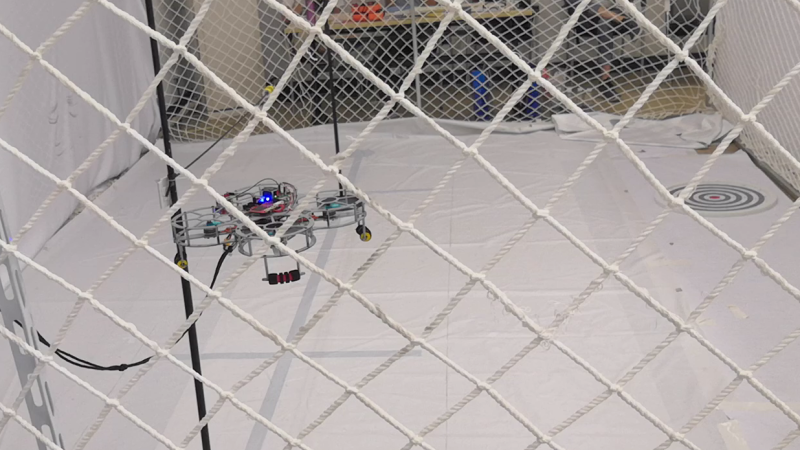
本四旋翼巡航机器人采用德州仪器C2000系列微处理器为主控模块,外加超声波模块实现定高、三轴陀螺仪实现姿态控制;为实现异物检测和拍照,无人机上配置了两个摄像头模组——一个用于地面信息采集、一个用于寻线缆并拍照存储;飞控板上另加一块OLED显示屏,用于电量、模式等的显示;主控板和其他模块的通信通过串口完成。整个系统通过C2000系列板为核心编程实现模式设置、数据采集、巡航报警、OLED显示等功能,该巡航机器人可实现规定范围巡航任务,并满足起飞降落时间小于150s、悬挂重物重量可调等要求。

点击空白处退出提示
评论