


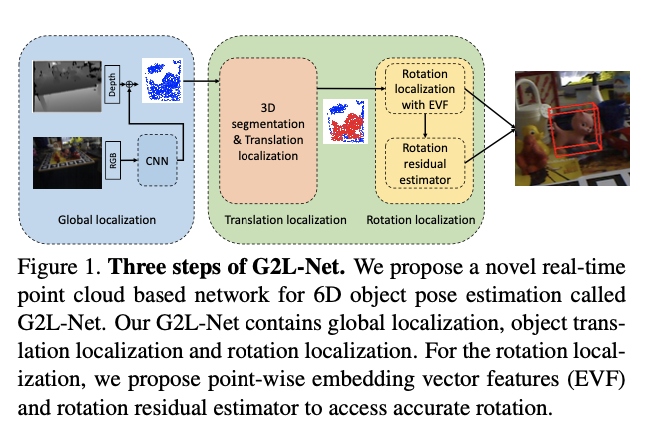
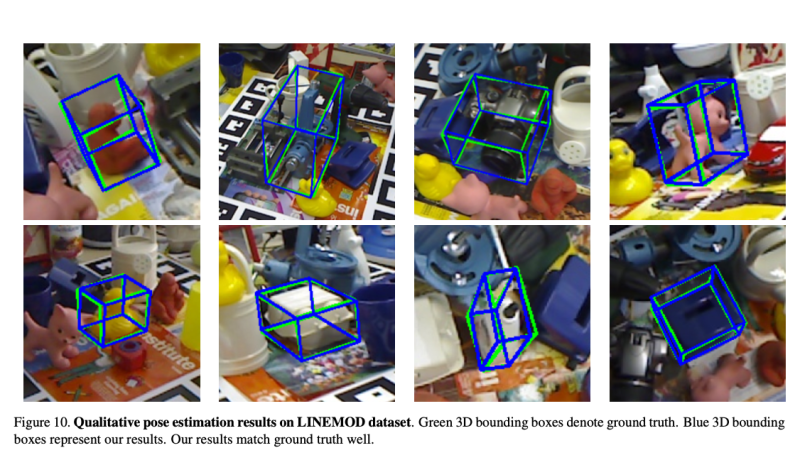
提出了一种新的快速准确估计物体6D姿态的算法,能以几乎实时的速度运行。并且所提出算法对光照变化鲁邦,需要的训练资源较少。

点击空白处退出提示



演示地址
https://openaccess.thecvf.com/content_CVPR_2020/papers/Chen_G2L-Net_Global_to_Local_Network_for_Real-Time_6D_Pose_Estimation_CVPR_2020_paper.pdf
提出了一种新的快速准确估计物体6D姿态的算法,能以几乎实时的速度运行。并且所提出算法对光照变化鲁邦,需要的训练资源较少。
评论