


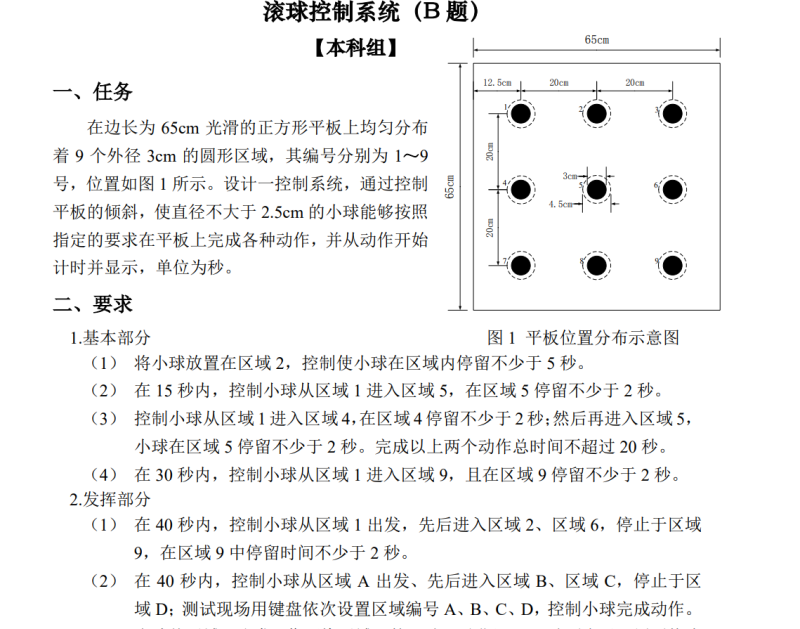
基于单片机K60(当时手头只有这个单片机)的滚球控制系统,20年参加电设之前用来练练手。摄像头使用的是openmv识别滚球,识别的小球坐标信息通过串口传输给单片机,希望小球实际坐标(X、Y轴)与目标(X、Y轴)坐标的误差为0,所以分别用两个舵机来快速调整木板平面,让小球稳定在我们想要的区域内。这个系统的控制基本功能实现后,后期都是在调PD参数。

点击空白处退出提示



演示地址
https://download.csdn.net/download/weixin_44455795/87257152?spm=1001.2014.3001.5503
基于单片机K60(当时手头只有这个单片机)的滚球控制系统,20年参加电设之前用来练练手。摄像头使用的是openmv识别滚球,识别的小球坐标信息通过串口传输给单片机,希望小球实际坐标(X、Y轴)与目标(X、Y轴)坐标的误差为0,所以分别用两个舵机来快速调整木板平面,让小球稳定在我们想要的区域内。这个系统的控制基本功能实现后,后期都是在调PD参数。
评论