


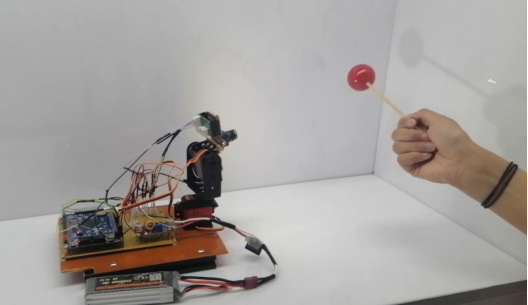
1.通过OpenMV识别出被测物体(以红色小球为例)。
2.在OpenMV识别出目标物体后,判断物体所在区域,将区域信息通过串口传输给STM32。
3.利用STM32的串口部分的应用及原理知识,对接收到的数据进行处理。
4.利用STM32的应用及原理知识,对处理好的数据进行判断后,对舵机进行控制。
5.利用STM32的定时器部分和PWM控制的应用及原理知识,控制舵机,使其转动适当角度,使OpenMV对准目标物体。

点击空白处退出提示



行业分类
物联网
1.通过OpenMV识别出被测物体(以红色小球为例)。
2.在OpenMV识别出目标物体后,判断物体所在区域,将区域信息通过串口传输给STM32。
3.利用STM32的串口部分的应用及原理知识,对接收到的数据进行处理。
4.利用STM32的应用及原理知识,对处理好的数据进行判断后,对舵机进行控制。
5.利用STM32的定时器部分和PWM控制的应用及原理知识,控制舵机,使其转动适当角度,使OpenMV对准目标物体。
评论