


项目描述:
利用搭载相机、LiDAR、高精度 IMU、GNSS 等传感器的专业采集车进行道路环境采集,经过感知、建图等环节构建高快
速路高精度地图,地图更新则采用众包车辆(相机、低精度 IMU、GNSS)来采集数据并进行数据比对与更新。
主要职责:
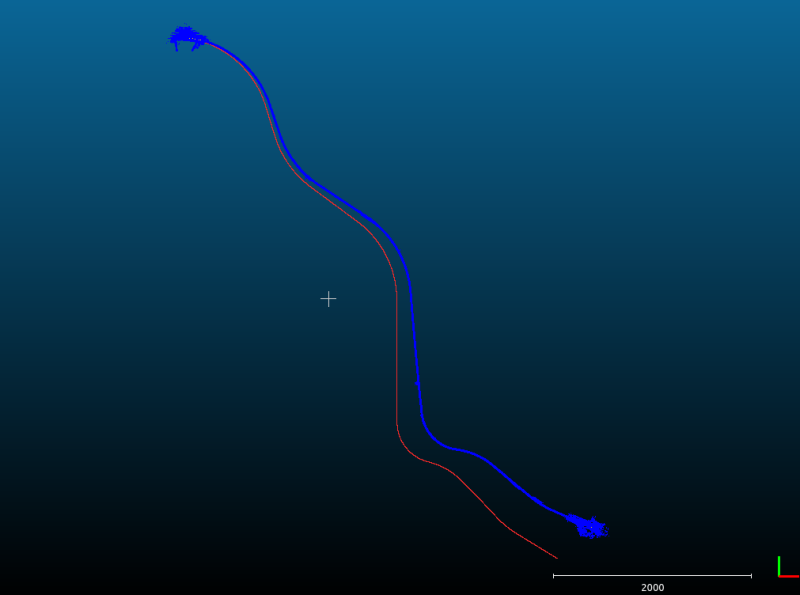
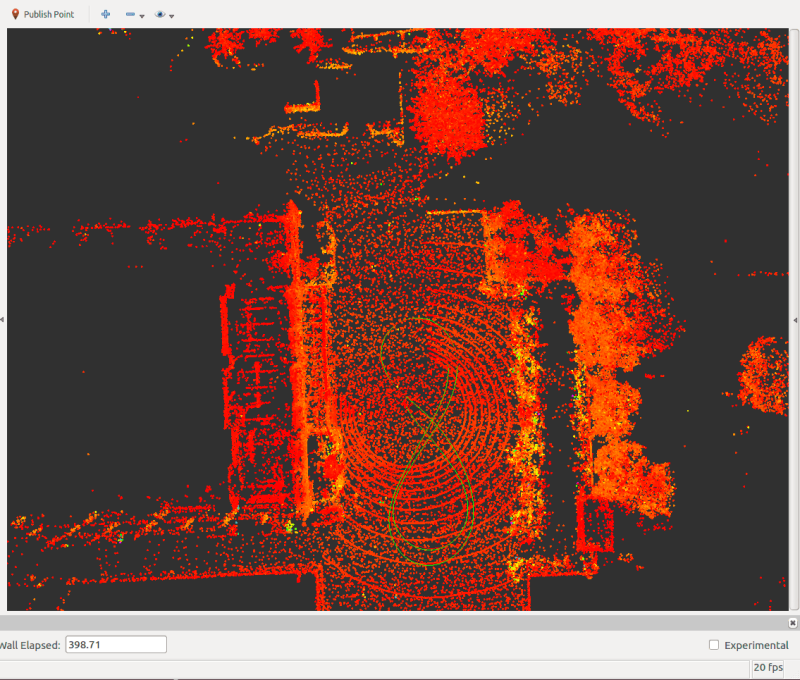
(1) 基于多传感器融合(LiDAR/IMU)的 SLAM 前端里程计研发

点击空白处退出提示



项目描述:
利用搭载相机、LiDAR、高精度 IMU、GNSS 等传感器的专业采集车进行道路环境采集,经过感知、建图等环节构建高快
速路高精度地图,地图更新则采用众包车辆(相机、低精度 IMU、GNSS)来采集数据并进行数据比对与更新。
主要职责:
(1) 基于多传感器融合(LiDAR/IMU)的 SLAM 前端里程计研发



评论