





项目描述:
利用搭载相机、半固态 LiDAR、IMU、GNSS 等传感器的众包车辆进行道路环境采集,经过感知、建图、拓扑等过程构建
城区地图。
主要职责:
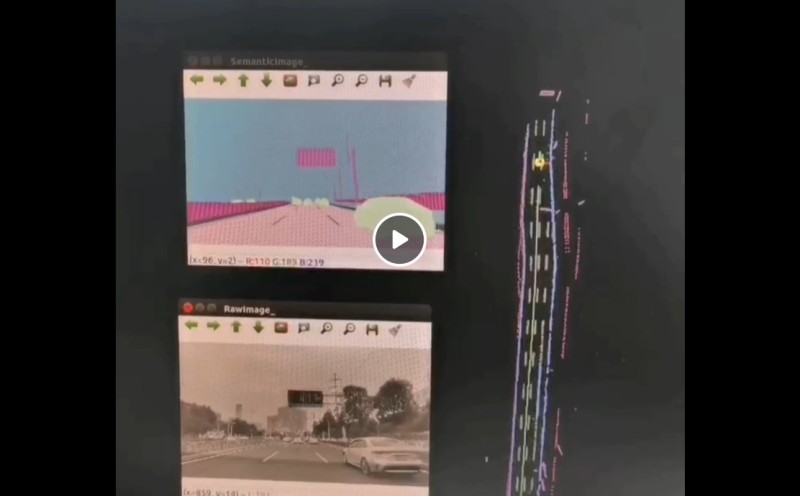
(1) 基于多传感器融合(IMU/轮速)的 SLAM 前端里程计开发;(2) 基于相机语义信息与激光点云融合的道路静态要素感
知结果矢量化与局部建图。
项目业绩:
1.里程计开发与优化,在零速更新(ZUPT)中加入零横向速度和垂直速度约束,降低位置漂移;
2.对静态要素感知结果(车道线/交通牌/减速带等)矢量化,精度优于基于相机语义信息/结构化信息的建图方案;
3.工程化,包括系统/软件架构设计与开发,实现数据处理时间与数据采集时间持平。


点击空白处退出提示
评论