


1.L2+/L3 辅助驾驶--高速120km/h目标跟踪 → 前视摄像头/雷达目标跟踪
2.线控底盘控制--越野颠簸+50kg载荷 → 烂路下的底盘姿态稳定控制
3.分布式车辆控制--Kalman+PID → 多车协同编队、车队跟踪

点击空白处退出提示



1.L2+/L3 辅助驾驶--高速120km/h目标跟踪 → 前视摄像头/雷达目标跟踪
2.线控底盘控制--越野颠簸+50kg载荷 → 烂路下的底盘姿态稳定控制
3.分布式车辆控制--Kalman+PID → 多车协同编队、车队跟踪
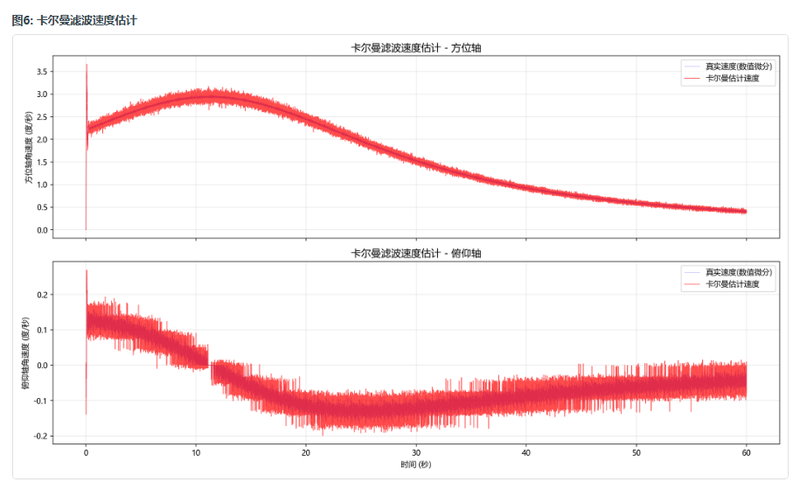
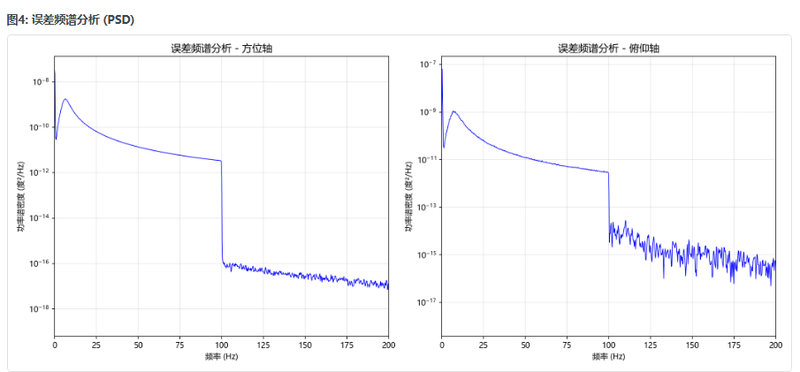
系统围绕高精度跟踪控制需求,构建了从算法验证到结果评估的完整闭环流程。首先通过算法预验证环节,检验Kalman滤波与PID控制算法的组合能否达到0.03°的跟踪精度目标;在此基础上,利用工况仿真模块模拟3级越野路面颠簸、120km/h高速目标跟踪、50kg载荷等真实工作条件,确保验证过程贴近实际应用场景;随后进入参数调优阶段,针对PID增益、滤波参数等关键变量进行系统化调整,搜索最优控制参数组合;调优完成后,由指标评估模块自动计算RMS误差、达标率、频谱特性等核心性能指标,客观判定系统是否满足技术要求;最终通过可视化报告功能,以中文图表及HTML报告的形式直观呈现控制效果,便于技术人员快速理解与决策。
系统在三种典型工况下均满足设计指标要求。在3级越野路面颠簸跟踪场景(20km/h、50kg载荷)下,跟踪精度RMS值仅为0.002°,达标率高达99.91%,远优于0.03°的指标要求;在颠簸后定位保持场景(50kg载荷)下,定位精度RMS值低至0.001°,达标率100%,完全满足0.01°的定位精度要求;在120km/h高速目标跟踪场景(50kg载荷)下,跟踪精度RMS值为0.004°,达标率99.83%,同样优于0.03°的指标限值。三项测试全部通过(PASS),充分验证了Kalman滤波+PID控制算法在复杂工况下的高精度跟踪能力与鲁棒性。
技术 具体应用
C++17 核心仿真引擎,模块化架构(9个独立模块)
CMake 跨平台构建系统
MinGW GCC Windows平台编译,-static静态链接消除DLL依赖
Python 3.12 数据分析与可视化脚本
Matplotlib + NumPy + SciPy + Pandas 图表生成、Welch法功率谱、高斯拟合
Inno Setup 6 Windows安装包制作



评论