


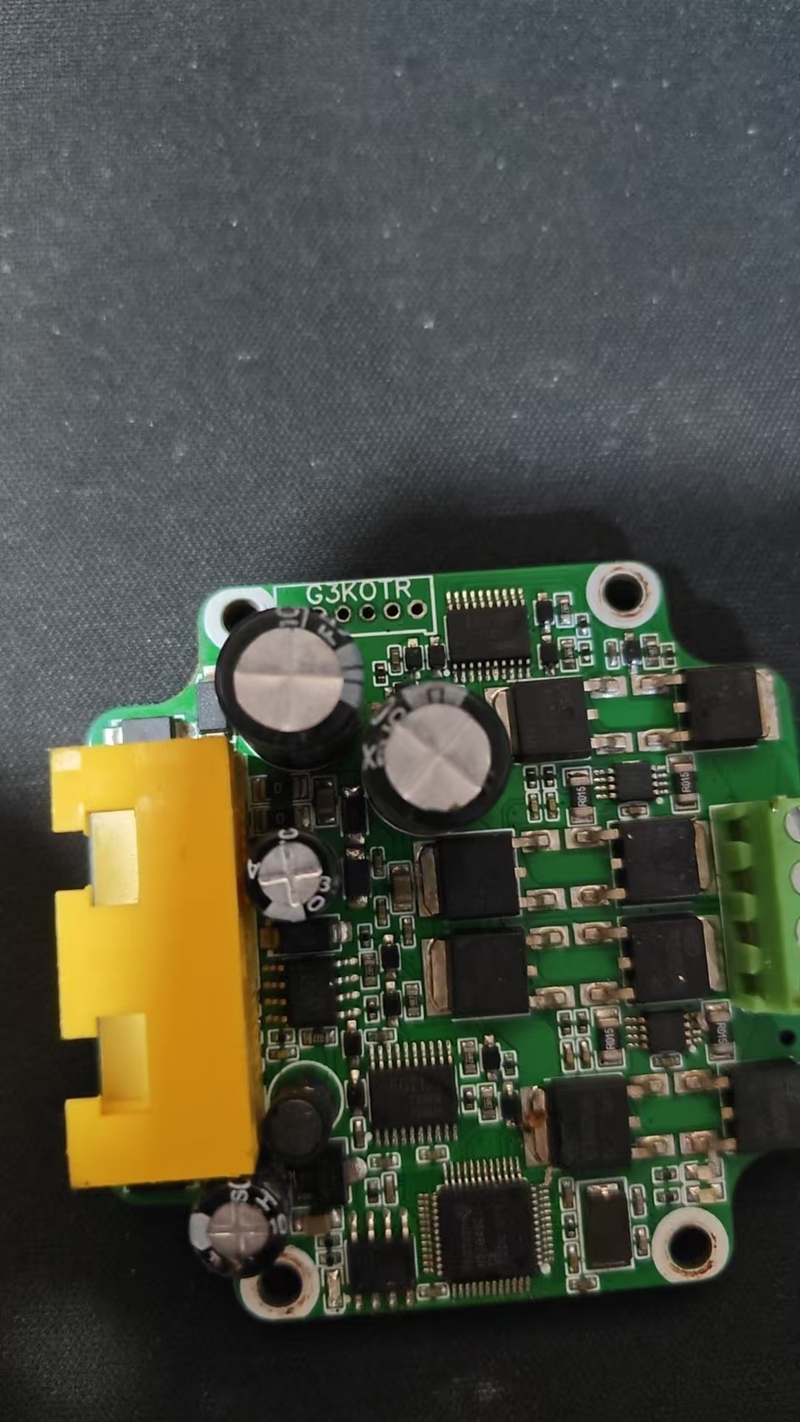
1 对步进电机进行闭环控制,目标是是
1 可以速度控制
2 可以位置控制
3 可以扭矩控制
简而言之,实现一个小型的闭环伺服电机系统。
采用485通信控制。
2 该项目产品用于自动化场景中,解决伺服电机过于昂贵,可选小型伺服数量少的问题。

点击空白处退出提示



1 对步进电机进行闭环控制,目标是是
1 可以速度控制
2 可以位置控制
3 可以扭矩控制
简而言之,实现一个小型的闭环伺服电机系统。
采用485通信控制。
2 该项目产品用于自动化场景中,解决伺服电机过于昂贵,可选小型伺服数量少的问题。
电机运动控制
1 位置控制,位置标定,绝对位置记忆,位置上电校准。结合扭矩控制。
2 速度控制,速度与扭矩结合控制。
3 扭矩控制。
与上位机通信
1 采用485通信
2 实现通信协议,
1 可设置、查询位置
2 可设置、查询速度
3 可设置、查询扭矩
3 实现bootloader,可远程更新程序。
1 负责PCB原理图设计,pcb设计,元器件选型
2 负责程序实现,调试,使用
3 负责自动化项目上位机与各电机控制通信。
4 负责自动化项目控制程序。

评论