

针对法奥FR5等工业机器人的语音驱动工作站。用户通过自然语音下达“抓起红盒子”“拧螺丝到B位”等指令,系统经本地Whisper ASR转文字、LLM理解意图并生成/匹配工作流JSON,结合视觉6D位姿与手眼标定执行机器人动作。部署于工控机,支持本地Ollama或云LLM,适用于产线柔性作业、视觉引导抓取、MCP Agent调用等场景,解决传统机器人编程门槛高、无法自然语言交互的痛点。

点击空白处退出提示



针对法奥FR5等工业机器人的语音驱动工作站。用户通过自然语音下达“抓起红盒子”“拧螺丝到B位”等指令,系统经本地Whisper ASR转文字、LLM理解意图并生成/匹配工作流JSON,结合视觉6D位姿与手眼标定执行机器人动作。部署于工控机,支持本地Ollama或云LLM,适用于产线柔性作业、视觉引导抓取、MCP Agent调用等场景,解决传统机器人编程门槛高、无法自然语言交互的痛点。
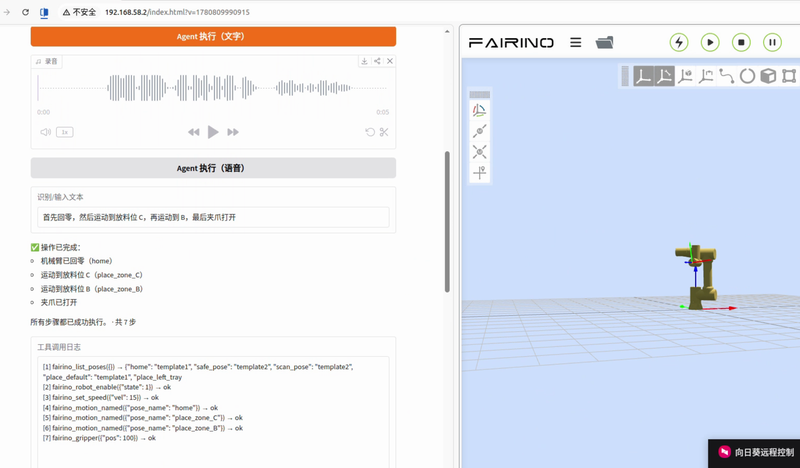
语音/文本指令解析与工作流执行:支持Whisper本地ASR + LLM意图识别,自动规划或执行预定义/生成的机器人步骤(move、grasp、vision.detect等)。
视觉系统集成:通过文件或HTTP与视觉模块对接,支持手眼标定、物体抓取偏移计算,实时回写6D位姿。
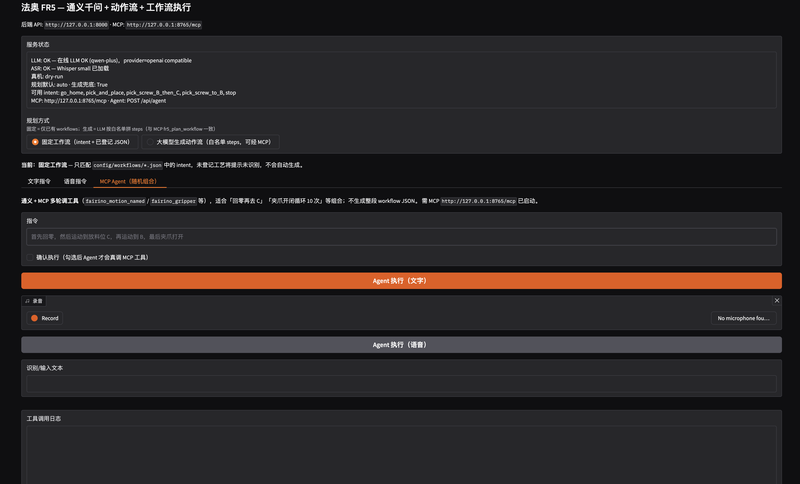
MCP工具服务:提供fairino_mcp供外部Agent调用机器人控制工具,实现LLM Agent驱动的机器人操作。
Web UI与API:Gradio界面支持语音输入、状态监控;FastAPI提供规划、执行、视觉接口(:8000)。
多环境部署:支持Windows/Linux工控机、Docker模拟器、sim/cloud/IPC配置切换,兼容本地与云LLM。
基于Python实现station_core工作流引擎、NLU(nlu_ollama/nlu_generate)、robot_exec执行层;集成fairino-python-sdk控制真实/模拟机器人;使用Ollama或DashScope实现LLM工作流生成;Gradio+FastAPI提供UI与API;YAML配置多环境;工作流JSON定义stepType;MCP协议暴露工具;支持vision文件/HTTP对接与手眼标定。
评论