


使用UR机器人加realsense实现对工作台面的实时三维重建和高精度抓取。原理就是在机械手带着realsense移动的过程中使用RGBD数据做slam计算出相机的位姿,并对场景进行三维重建,之后在三维点云中检索和匹配待抓取的物体,定位后驱动机械手去抓取。该方案成本低廉,可以做到1mm的定位误差。

点击空白处退出提示



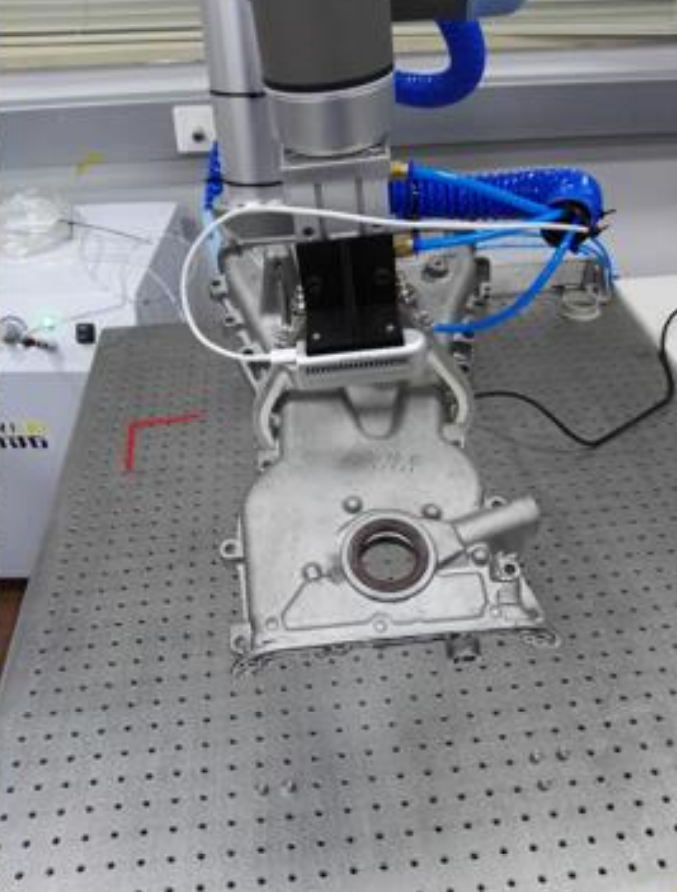
使用UR机器人加realsense实现对工作台面的实时三维重建和高精度抓取。原理就是在机械手带着realsense移动的过程中使用RGBD数据做slam计算出相机的位姿,并对场景进行三维重建,之后在三维点云中检索和匹配待抓取的物体,定位后驱动机械手去抓取。该方案成本低廉,可以做到1mm的定位误差。

评论