


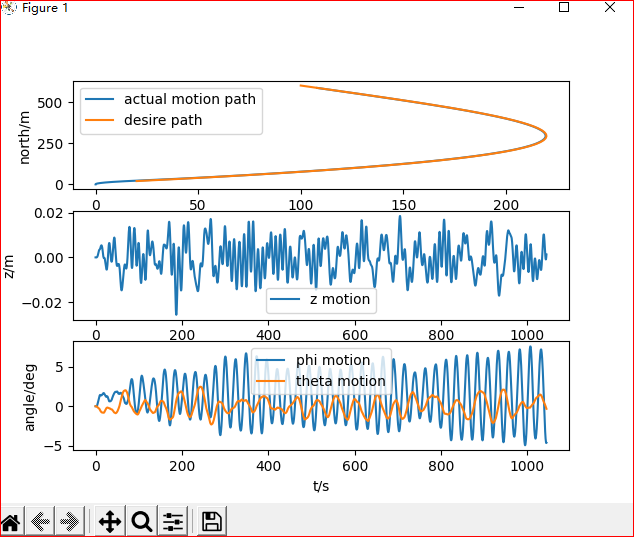
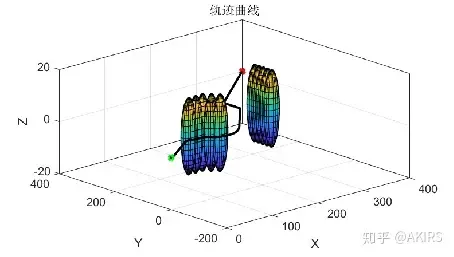
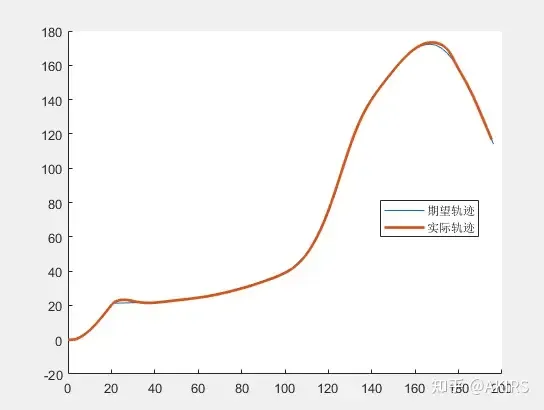
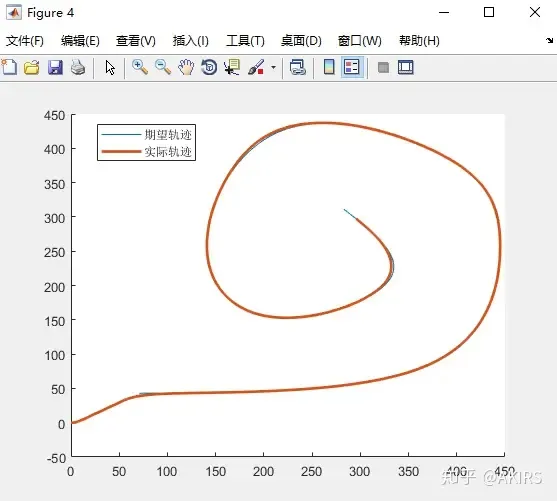
1. 项目可进行无人艇运动控制仿真,包括路径跟踪、多目标避障.一个插值跟踪,一个人工势场避障,只有简单的例子。无人船的水动力系数和其他参数可以按实际船型在boat.ini文件中修改。
2. 个人拥有该仓库账号,开发了全部源代码。

点击空白处退出提示



语言技术
SQLite开源地址
https://gitee.com/babakara/control-py授权协议
LGPL许可
1. 项目可进行无人艇运动控制仿真,包括路径跟踪、多目标避障.一个插值跟踪,一个人工势场避障,只有简单的例子。无人船的水动力系数和其他参数可以按实际船型在boat.ini文件中修改。
2. 个人拥有该仓库账号,开发了全部源代码。
评论