首页
程序员
产品
招聘用人
云端工作
自由工作、远程工作
项目研发
需求梳理
规划落地您的想法
整包开发
一站式软件开发
云服务
UniSMS
合一短信 聚合API短信平台
技术
发布需求
开发者入驻
APP
登录
/
注册
全部
动态
开源项目
源文件源码
产品系统
Java
Python
C/C++
PHP
C#
TypeScript
Go
.NET
更多
C/C++
C语言是在70年代初问世的。一九七八年由美国电话电报公司(AT&T)贝尔实验室正式发表了C语言。同时由B.W.Kernighan和D.M.Ritchit合著了著名的“THE C PROGRAMMING LANGUAGE”一书。通常简称为《K&R》,也有人称之为《K&R》标准。但是,在《K&R》中并没有定义一个完整的标准C语言,后来由美国国家标准学会在此基础上制定了一个C 语言标准,于一九八三年发表。通常称之为ANSI C。
Create_OS
基于汇编语言+c语言实现一个64位操作系统,完成从实模式到保护模式再到64位模式的跳转,同时使用汇编完成FAT12文件系统
137
0
C/C++
三国战纪
1 横版格斗回合制的2d手游,负责,开发,迭代,保证线上版本的稳定; 2 检查服务端开发小组成员代码逻辑,判断并解决生产环境下由于代码逻辑导致的疑难杂症; 3 协助运维,保证生产环境下,服务器运行稳定,网络收发包正常,CPU负载,内存占用,外挂检测; 4 配合策划实现逻辑功能的开发; 5 配合运营分析线上数据;
240
0
C/C++
游戏模拟器/工具/引擎
hvv蓝队中级
护网项目,对天眼态势感知系统进行告警监测,对发现的紧急事件进行分析研判,封堵IP;与二线同事对接安全设备调试工作;设备巡检以及日报编写;期间溯源利用弱口令进入攻击队资产搜集系统后台,编写报告;内部攻防演练期间发现信息泄露漏洞一枚;
145
0
C/C++
Python开发工具
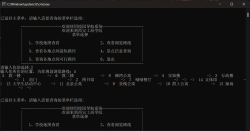
校园导航系统
校园导航系统使用无向网表示所在学校的景点平面图,提供景点介绍,景点查询、景点路线导航等功能。 功能:1)地图实现功能:设计校园平面图,展示校园中所有地点。2)地点查询功能:为来访客人提供图中任意景点相关信息的查询。3)导航功能:为来访客人提供途中任意景点的问路查询,即查询任意两个景点之间的一条最短的简单路径。4)导航功能:为来访客人提供途中任意两个景点的所有路线查询,即查询任意两个景点之间的所有路径。5)导航功能(多点导航):实现多个景点之间的访问路线查询,即查询路过多个景点的一条最短的简单路径。
154
0
C/C++
作业/任务调度
智能矿分选设备云平台Web & Web API
通过C++上传的各系列各型号对于矿的分选实时数据,进行图表(EChart)和表格整合,由智能设备大数据分析推送不同的解决方案,从而达到绿色矿山的目标,助力矿业生产可持续发展,另一方面分析C++上传的日志可得设备故障和预测设备保养而制定推送保养计划,分析本地空场日志预测射线衰减等情况,通过算法文件生成灰度图等。 系统环境:windows 10、MySql、Visual Studio 2022、Windows Server 2016 所用技术: 1). 后端技术: * Asp.Net MVC5 + 版本 API; * Async和Await 异步编程; * Repository + Service 仓储模式编程; * Swagger 前后端文档说明,基于RESTful风格接口; * CORS 简单的跨域解决方案; * AOP基于切面编程技术; * Autofac 轻量级IoC和DI依赖注入; * JWT权限验证; * Dapper&SqlSugar ORM框架; * Signal
162
0
C/C++
服务框架/平台
XX数据上报系统
1.使用Qt、C++对各种数据在本地进行录入、采集、导入,汇总的数据按照一定规则,加密汇总上报到数据中心。 2.程序框架、主要编码主要由我完成。
167
0
C/C++
Filer局域网文件传输工具
这是一个局域网内文件传输和短消息传输工具 工具包内包含了数个版本的客户端,以及一个ip server。其中ip服务器负责向各用户提供ip服务,每个客户端在工作的工程中均会首先向服务器汇报自己的ip地址,同时从ip服务器获取其他用户的ip地址。用户在得到ip之后将会直接在两个需要通信的客户端建立tcp连接,用户之间直接通过socket以tcp协议完成短消息和文件的收发。
123
0
C/C++
Qt
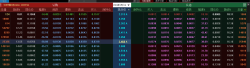
期权的盘后撮合
4、从事衍生品期权软件开发,盘后根据一天的交易情况回溯当天情景, 方便交易者复盘,相当于盘后重放的功能。
100
0
C/C++
ORM/持久层框架
openvpn最佳开源版
开源项目
应用场景 公司员工。通过它,连接到公司内部,办公访问业务系统 你在家有nas。有软路由,有一些linux或windows。从外面连接到家 (或者在新马泰玩儿。在国外看、Youku、爱奇艺、腾讯视频 )
140
0
C/C++
H5网站
印刷工业软件
该公司主要是开发印刷行业的设备,设备集成印刷检查算法、硬件工艺设计、设备控制软件三大部分,我主要负责的是设备控制软件的开发及算法授权系统开发。
130
0
C/C++
PLC 嵌入式PC 工具开发
适配PLC工具,完成PLC 嵌入式得工具开发,需要完成PLC与嵌入式硬件的通讯,编译并下载PLC编译文件。需要具有用户友好配置手段,以完成对不同产品的配置工作。
241
0
C/C++
Python
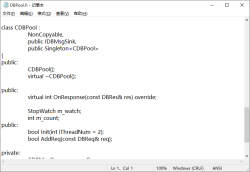
mysql异步工具
mysql数据库操作工具, 1 封装mysql api,长连接或者短连接,支持常用的增删改查操作; 2 支持windows和linux环境,实现了一个线程池,支持异步跨数据库读写; 3 可以作为后端开发工具;
143
0
C/C++
数据存储
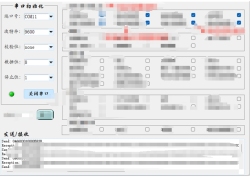
表计调试工具
表计调试工具:独立完成上位机调试工具开发。 串口通信,封装私有协议,通过串口与表计设备进行通信。 QT5开发上位机实现通信报文展示。
106
0
C/C++
Qt
某XX训练软件
1.使用Qt、C++实现客户端与后台的数据交互,在各个阶段,训练数据创建、生成。 2.项目的整体搭建,主要编码工作都是有我来完成。
142
0
C/C++
旅游推荐管理系统
基于B/S的旅游推荐管理系统分析与设计:该项目系统前台主要使用JSP作为开发语言,后台使用Sq1Server作为数据库管理系统,开发环境是MyEclipse,服务器采用tomcat,开发出的一个基于Web技术的B/S结构的旅游推荐管理系统。基于B/S的旅游推荐管理系统按使用者划分角色权限。
119
0
C/C++
C/C++开发工具
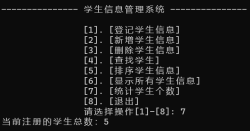
学生信息管理系统
简介:为在校学生设计的在线学生信息管理系统,旨在帮助辅导员更方便地完成学生信息的选择和登记和排查。学生的个人信息和选择方采用选用线性表的方式实现,通过线性表的基础操作管理系统内学生的数据。 功能:1)登记学生信息:输入学生人数,出现输入提示,并且依次输入这几个学生的信息(例如包括学生的姓名、学号、成绩等)。 2)新增学生信息操作:选择插入的位置,输入新增对象的信息数据。3)删除学生信息操作:寻找删除的位置,并输出所有学生的列表数据。4)查找学生功能:根据学生的学号或姓名查询该学生,并输出该学生的所有信息。5)学生信息排序:可以按照学号大小实现对学生进行排序或查找功能。6)统计当前的报名系统上学生的信息(个数统计,全部展示)。
149
0
C/C++
菜单 (Menu)
算法IDE平台
参与算法IDE平台桌面端的开发,使用Vue 3、TypeScript、Vite 、Pinia等技术 实现渲染层UI和产品功能的开发,使用Electron框架实现主进程的功能开发,并成功打包生成windows和linux软件包。 该平台具备 拖拽算法组件进行组态生成可执行的商用算法解决方案,并搭载算法商城进行在线购买下载算法SDK、以及后续算法的授权管理、算法生态(角色管理、算法购买分销等),使得AI由人工开发模式,转变为半自动化、自动化开发模式,大幅降低客户AI的开发成本、周期和使用门槛,促进和加速AI的产业化和规模化 使用C++ 为算法提供授权工具
183
0
C/C++
Teamcenter服务端开发
基于西门子的PLM软件Team center进行的二次开发,主要包括handler开发、Userservice开发、Dispatcher开发、Utility小程序开发等。 handler开发:规则handler、action handler userservice开发:解决客户端执行复杂逻辑占用内存高,时间长的问题 Dispatcher开发:tc自带的可定制的定时调度任务 Utility小程序开发:可执行程序,无界面登录进行数据处理
155
0
C/C++
c++
RFADS雷达火情自动侦测系统
1、主要功能包括S/X波段雷达基数据解析处理、地图绘制、火情判断、文件输出、图片处理、实时预警等功能的开发; 2、使用了C++、QT相关技术,通过雷达系统产生的基数据获取相关火情回波。
101
0
C/C++
停车场管理系统
停车场管理系统处理校园停车数量统计及进出车辆收费问题 功能: 1)停车场功能展示:设计功能展示界面,展示停车场可以实现的所有功能,根据具体操作指引实现相关功能。2)停车到达操作:记录车辆信息,车辆到达时间,车辆入场编号等。3)车辆驶出操作:记录使出车辆编号,车辆驶出时间,计算车辆停留时间,及停车费(具体单价自定义)。4)停车场车辆查询功能:查询停车场内所有车辆信息及编号。5)便道车辆查询功能:查询便道内所有车辆信息及编号。
175
0
C/C++
作业/任务调度
当前共5438个项目
...
40
41
42
43
44
45
46
47
48
49
50
...
登录
登录后即可上传、下载作品
搜索
分类
web
flutter
汇编
直播
ERP
BUG跟踪管理
ActionScript
crm
Web应用开发
Clojure
×
寻找源码
源码描述
联系方式
提交
重点城市程序员兼职推荐
北京程序员兼职
上海程序员兼职
深圳程序员兼职
杭州程序员兼职
广州程序员兼职
成都程序员兼职
南京程序员兼职
武汉程序员兼职
西安程序员兼职
重庆程序员兼职
郑州程序员兼职
长沙程序员兼职
苏州程序员兼职
合肥程序员兼职
厦门程序员兼职
济南 程序员兼职
青岛程序员兼职
天津程序员兼职
大连程序员兼职
福州程序员兼职
石家庄程序员兼职
沈阳程序员兼职
太原程序员兼职
无锡程序员兼职
南昌程序员兼职
哈尔滨程序员兼职
南宁程序员兼职
珠海程序员兼职
宁波程序员兼职
昆明程序员兼职
东莞程序员兼职
贵阳程序员兼职
美国程序员兼职
长春程序员兼职
温州程序员兼职
佛山程序员兼职
常州程序员兼职
呼和浩特程序员兼职
兰州程序员兼职
乌鲁木齐程序员兼职
中山程序员兼职
海口程序员兼职
洛阳程序员兼职
更多
重点岗位程序员兼职推荐
C++兼职
Rust兼职
小程序兼职
cocos2d-x兼职
Unity3D兼职
DBA兼职
运维兼职
测试兼职
移动其他兼职
Go兼职
UE设计师兼职
全栈兼职
技术创始人兼职
CTO兼职
项目经理兼职
产品经理兼职
原画师兼职
UI设计师兼职
前端兼职
iOS兼职
Android兼职
Node.js兼职
Ruby兼职
架构师兼职
Python兼职
C#兼职
C兼职
PHP兼职
Java兼职
鸿蒙兼职
区块链兼职
人工智能兼职
硬件开发兼职
更多
您好 👋
我们能提供什么帮助?
向我们发送消息
常见问题、使用帮助、人工咨询等
智能搜索
手机访问
使用微信扫一扫