

中文母语水平
英语借工具书面交流
0
1
2
3
4
5
我是李志鑫,2001年10月出生,河南南阳人,现为中国共产党党员。目前就读于中国矿业大学(211、双一流)电子信息-控制工程专业,预计2026年7月获得硕士学位。本科毕业于河南理工大学自动化专业(2019-2023)。我的研究方向主要聚焦于工业机器人规划控制与数字孪生技术,致力于通过智能算法和虚实交互提升机器人系统的效率和自主性。
在教育与学术方面,本科期间主修C语言、模电、数电等课程,成绩优异(如C语言93分),并获得大学生工程训练综合能力竞赛、电子设计大赛等省部级奖项6项。研究生阶段,我已发表专利6项(其中2项授权,包括基于多分支神经网络的机械臂关节映射数字孪生建模方法等,另4项实审中),会议论文(CPCC)一作1篇,软著2项(授权)。此外,荣获中国矿业大学集萃奖学金和研究生一等学业奖学金。
专业技能方面,我熟练掌握Python、C/C++/C#(Unity3D)等编程语言,能独立配置Git仓库和MySQL/Oracle数据库;嵌入式开发经验丰富,包括STM32/TC264/ESP32等单片机裸机开发,熟悉串口、IIC、SPI、CAN等协议,以及FreeRTOS和嵌入式Linux系统;机器人开发上,精通ROS(仿真+实物),掌握机械臂运动学/动力学建模、路径规划、运动控制;算法技能包括强化学习(如DQN/PPO/SAC)、PID、RRT系列等;英语通过CET-6(考研英语80分),能流畅阅读英文文献。
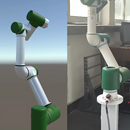
项目经历包括方面,我参与机器人自动制样过程数字孪生系统开发,使用Unity构建机械臂数字实体,通过TCP/IP实现虚实交互,并应用PPO算法训练逆运动学模型。同事参与水下管道巡检机器人,在这个项目,我基于STM32F407设计硬件电路,使用PID控制实现水下深度和姿态平衡,集成传感器进行障碍识别。
我具有较强的抗压能力和动手实践能力,自主学习力强,善于团队合作,积极乐观。业余喜欢慢跑、羽毛球和乒乓球等运动。期待与大家交流合作,一起探索科技前沿!
2024-08-01 -2025-08-21赛摩智能科技集团有限公司仿真工程师(机械臂方向)
1. 使用 Unity 平台, 制作机械臂数字实体,并搭建机械臂数字实体工作空间; 2. 通过 TCP/IP 通讯协议,实现物理实体和数字实体的交互控制, 实现虚实交互功能; 3. 在数字实体环境下针对机械臂的逆运动学求解的单步决策性, 设计奖励函数,并通过 PPO 算法训练机械臂逆运动学模型;
2023-09-01 - 2026-06-30中国矿业大学控制工程硕士已认证
2019-09-01 - 2023-06-30河南理工大学自动化本科已认证
1.使用Unity平台,制作机械臂数字实体,并搭建机械臂数字实体工作空间;2.通过TCP/IP通讯协议,实现物理实体和数字实体的交互控制,实现虚实交互功能;3.在数字实体环境下针对机械臂的逆运动学求解的单步决策性,设计奖励函数,并通过PPO算法训练机械臂逆运动学模型;

1.负责机器人整体硬件电路设计制作全过程,包括外设、电源电路等关键模块设计与调试;2.使用SPI、IIC、UART等通信协议,感知水深传感器、姿态传感器和摄像头数据并进行解析传输;3.编写位置式PID电机控制程序实现机器人水下深度和姿态的控制,并进行整机调试,实现动态平衡;




