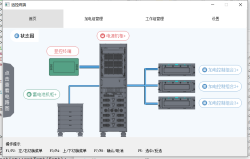
EMS能源管理系统应用于工商储能。采用c++语言开发,基于 linux 系统开发,采用交叉编译器,最终运行 arm 板上。系统架构主要划分为以下核心模块:通信模块、设备模块、协议模块、控制命令模块、数据库模块。通信模块封装了 mqqt、can、485、tcp、http、websocket 、串口通信。设备模块包括 BMS、PCS 逆变器、智能电表、消防等,该模块可以任意扩展其他需要的设备,只需要从基类继承。协议模块和设备模块类似,根据不同的设备封装了相应的协议解析。控制命令模块封装了不同设备的控制指令。数据库模块主要用于存储设备运行过程中的实时数据,方便历史查看和分析。除了以上核心模块外还有些小模块主要辅助核心模块做业务逻辑处理。