项目工具 :Qt Creator 4.11.0 、ubuntu 系统、MobaXterm、ARM 三星开发板
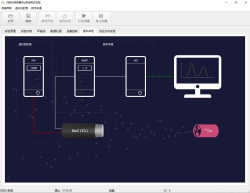
项目成果 :用户通过刷卡,识别卡号,选择车位,通过摄像头记录车牌号,并获取此时的信号发送者(用户)和停车的时间,一并加入到数据库。用户二次刷卡时代表用户下班了,此时删除用户在数据库的数据,当然数据库的操作是由管理员完成。
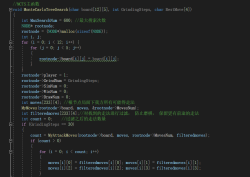
技术描述 :在QT环境下利用C/C++语言编写串口代码、摄像头代码、jpg解析,利用信号与槽和线程完成。打开/dev/ttySAC1串口,开启一条线程完成串口中的波特率、校验和、停止位的初始化,线程中重写父类方法,用来发送A,B命令,完成识别获得卡号,摄像头是处于开启(在定时器槽函数里),有车进库就识别车牌,通过Linux中的linux/videodev2.h,将YUYV格式的摄像头初始化,转化为RGB数据,保存为jpg图片,借助车牌识别源码解析jpg图片获取车牌,用户信息通过多个按钮关联一个槽函数,然后信息插入到数据库,主次线程同步工作完成项目需求。
项目职责 :主要负责代码编写、运行代码和测试