


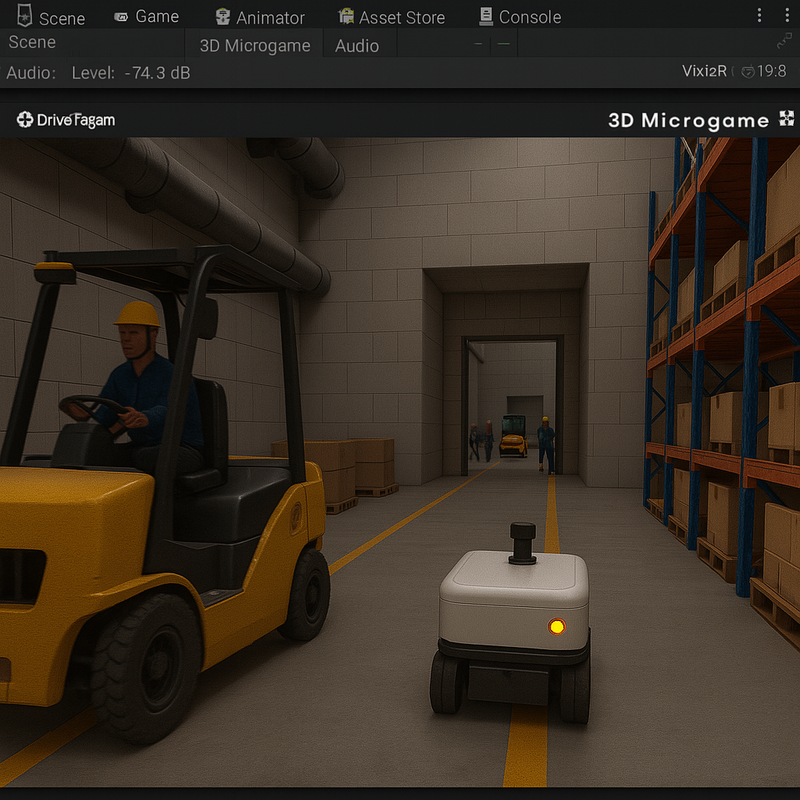
自动驾驶与智能网联汽车研发过程中,企业普遍面临真实道路数据采集成本高、极端/长尾场景稀缺、算法验证周期长且风险高等问题。DriveTest X 元境评测面向智驾企业、算法团队和科研机构,构建虚拟驾驶环境,批量生成雨雪、夜间、施工、动物横穿、异常行人等复杂工况数据,并提供算法性能评估与漏洞发现能力,帮助客户在真实上路前完成低成本、高效率、高安全性的虚拟测试验证。

点击空白处退出提示



自动驾驶与智能网联汽车研发过程中,企业普遍面临真实道路数据采集成本高、极端/长尾场景稀缺、算法验证周期长且风险高等问题。DriveTest X 元境评测面向智驾企业、算法团队和科研机构,构建虚拟驾驶环境,批量生成雨雪、夜间、施工、动物横穿、异常行人等复杂工况数据,并提供算法性能评估与漏洞发现能力,帮助客户在真实上路前完成低成本、高效率、高安全性的虚拟测试验证。
平台围绕“虚拟仿真+数据服务+算法测评”搭建一体化功能体系:
1)虚拟仿真环境模块:构建城市道路、高速、乡村道路、恶劣天气等高保真驾驶场景;
2)智能数据生成模块:生成图像、点云、毫米波雷达、GPS/IMU、车辆轨迹与决策逻辑等多模态数据;
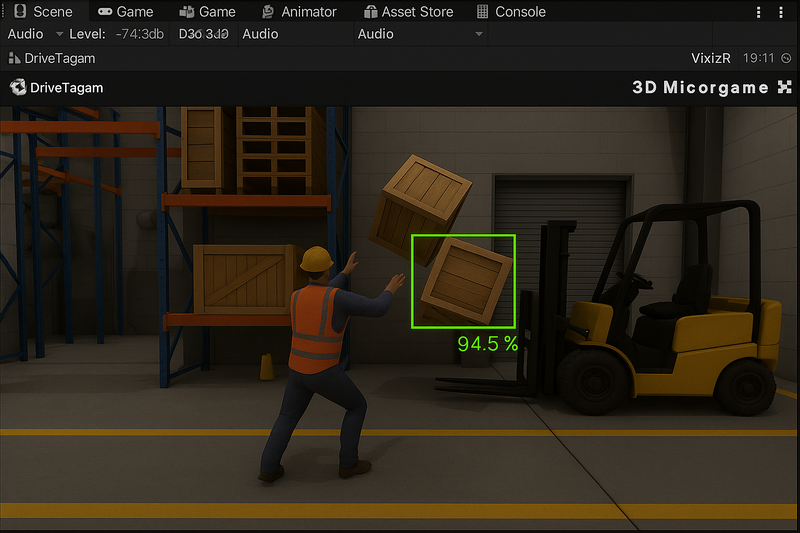
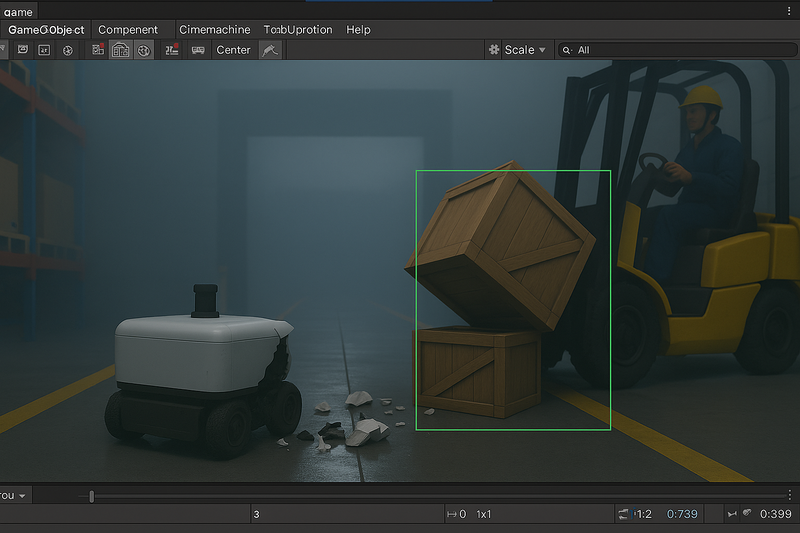
3)算法测评模块:支持感知、预测、规划、控制等算法接入,输出安全性、准确性、实时性、鲁棒性评估;
4)数据管理与交付模块:完成数据集管理、格式转换、报告生成与交付;
5)数据安全模块:支持加密传输、权限校验、审计日志与结果溯源。
主要负责平台方案设计与核心算法/原型实现:基于 Unity 3D 搭建复杂工况虚拟仿真环境,设计车辆动力学、传感器仿真、场景参数化与批量生成流程;结合 YOLOv10 目标检测、动态时空图卷积网络、GAS-H-Trans 分割模型与 PSO 优化人工势场法,实现环境识别、交通流预测、路径规划与避障验证;将仿真、数据生成、算法测评、报告输出等能力进行模块化封装,并接入 Web 可视化界面,支持测试任务配置、结果展示、数据交付和评测报告生成。项目在 Unity 复杂场景中完成多轮避障实验验证,形成可展示的竞赛级产品原型。


评论