首页
程序员
解决方案
招聘用人
云端工作
自由工作、远程工作
项目研发
需求梳理
规划落地您的想法
整包开发
一站式软件开发
作品
发布需求
开发者入驻
APP
登录
/
注册
技术
全部
Python
Java
PHP
C
C++
Android
iOS
Go
Rust
Ruby
Swift
Node.js
Unity3D
Object-c
Solidity
TypeScript
Perl
Flutter
Vue
JavaScript
更多
行业
全部
人工智能
区块链
工业互联网
金融
游戏
智能硬件
企业服务
物联网
云计算
低代码
VR/AR
生活旅游
物流仓储
社交
在线教育
网络安全
医疗健康
机器人
自动驾驶
量子计算
更多
其他
类型
全部
全部
语言框架
开源项目
源文件源码
产品系统
系统
全部
全部
Web
Android应用
iOS应用
小程序轻应用
Windows
MacOS
HarmonyOS
Linux
iPadOS
H5
车载应用
电视应用
Web3
云服务
嵌入式硬件
算法模型
开源软件
脚本插件
全部
C++
C++是一门由Bjarne Stroustrup于1980年代在贝尔实验室开发的通用编程语言,其设计初衷是“带类的C”,即在C语言的基础上增加了面向对象编程等特性。它完美继承了C语言的高效性和底层控制能力(如指针和内存直接操作),同时引入了类、封装、继承、多态等面向对象机制,以及模板、泛型编程、异常处理、标准模板库(STL)等现代特性,使其成为一个兼具高性能和高抽象层次的多范式语言。C++以其极高的执行效率和灵活性著称,既可用于开发操作系统、游戏引擎、嵌入式系统、高频交易等对性能极度敏感的底层系统,也能构建大型复杂的桌面应用和服务器软件。然而,这种强大和自由也带来了显著的复杂性,学习曲线陡峭,需要程序员手动管理内存并深入理解语言细节。尽管面临现代语言(如Rust、Go)的挑战,但凭借其成熟的生态、庞大的代码遗产和持续的标准化演进(C++11/14/17/20),C++至今仍是系统级开发和高性能计算领域不可或缺的基石语言。
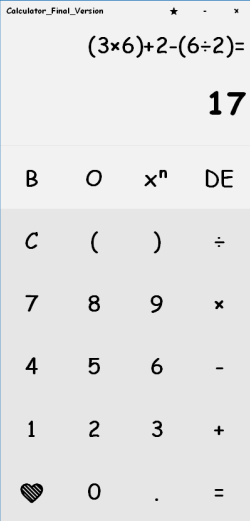
计算器
实现了一个小型计算器,支持键盘输入和鼠标点击输入; 1. 支持基本四则运算、乘方运算、进制转换(十进制到二进制、八进制和十六进制); 2. 使用栈进行括号匹配; 3. 运算优先级:括号>幂运算>基本四则运算; 4. 可更换计算器界面颜色; 5. 实时显示正在计算的表达式,并支持清除和退格; 6. 某些按键会触发菜单。
164
0
C/C++
c++
绘图软件
1. 基本图元绘制:支持直线、矩形、圆、椭圆、Bezier曲线、多边形、B样条曲线的绘制。 2. 实时绘制:通过鼠标输入图形参数,实现实时绘制效果。 3. 菜单栏选择:用户可通过点击上方菜单栏选择不同的绘制功能。 4. 状态栏:在窗口底部设置状态栏,显示鼠标实时坐标,显示当前绘制状态。 5. 交点计算与突出: 计算两直线、直线与椭圆、直线与圆、两圆的交点。 靠近交点时,用×绘出交点,并用红色实心突出交点。 6. 交点信息显示: 鼠标移动到交点附近时,在状态栏显示交点坐标。 移动到圆或椭圆的边上时,显示圆心坐标,并采用同交点绘制的方式着重绘制交点。 7. 垂线绘制:支持绘制某点到某直线的垂线,自动捕获垂足。 8. 鼠标交互: 当鼠标移动到图元上时,鼠标样式更改为十字。 单击右键可删除当前选择的图元。 选择曲线时,需将鼠标移动到曲线的端点上实现选择功能。 9. 清空画布:通过点击菜单上的Clean(C)选项,实现清空画布功能。 10. 显示/隐藏栅格:通过点击菜单上的ShowGrid(G)选项,实现显示或隐藏栅格。 11. 填充图形:支持填充矩形和用多边形绘制的三角形。 12. 图形变换:实现平移、旋转、缩放、裁剪功能。
144
0
C/C++
c++
摄像头图像识别监控
由摄像头rtsp地址传入视频流,h264解码后,进行图像识别,生成新的视频流,通过live555发送到网络。 经过量化的模型,可以运行在较低端的intel i3处理器上。
140
0
深度学习
python
高校社团管理系统
1. 登录模块,用户模块、管理员模块;用户模块:用户可以登录,注册、申请加入社团、申请创建社团、申请加入社团活动以及社团推荐;管理员模块:社团管理、社团申请审批、社团活动审批等 2. 本项目有本人独立完成,主要使用:c++、qt,mysql、web、html、css,js 3. 本项目在开发期间主要对http协议不是很熟悉以及是第一次设计私有协议,解决办法是多了解http协议以及查看牛人和去定义私有协议
133
0
C/C++
Qt
VS下的开发
对工厂测试较为熟悉,有过多年的工厂测试软件开发经验,仪器控制,GPIB,UART,Socket,多线程等掌握较熟练,硬件控制,上位机开发
94
0
自动化测试
C#
ROS导航框架仿真
开源项目
1、导航框架ROS封装,拥有日志系统和任务模块 2、四轮底盘机器人模型,使用arbotix仿真插件进行仿真 3、可以通过ROS遥控节点控制,仿真的当前位置获取 4、小车的状态信息通过topic发送出去 5、完善录制线路,发布线路,仿真验证
182
0
C/C++
c++
履带机器人
开源项目
1、实现3D和2D雷达避障,并且提取外参作为可修改参数 2、增加到达终点减速逻辑,位置PID控制 3、原有的小车当前消息状态通过topic发布 4、原有的RVIZ仿真环境保留,方便调试代码使用 5、发布全局线路改为ROS服务的形式,支持1-1000号的线路 6、使用ROS服务的形式录制线路,支持1-1000号的线路,提取两个路线点的间隔出来为可配置参数 7、增加行使途中可以更改速度的接口 8、支持缠绕的线路,录制线路时候有重合的线路不影响行使 9、增加小车行使过程中暂停的功能,取消暂停可以重新行使
197
0
C/C++
c++
ROS机器人小车
1. 激光雷达定位导航,基于ROS,可实现gmapping建图,navigation导航 2. 单片机控制电机,串口通信,手柄遥控 3. 小车底盘运动解算,PID调试电机 4. 路径规划算法开发,pure_pursuit纯跟踪,遇到障碍物停止,绕障算法
200
0
C/C++
c++
异步tcp客户端
独立完成 tcp 异步客户端的开发(基于 asio 网络库),包括定时器功能,支持断线重连,主动重连 对现有云台进行重构,使用 ros action 机制,云台以服务器形式对外提供服务,支持多种功能
136
0
C/C++
c++
自动驾驶系统事件管理模块
自动驾驶系统事件管理模块(C++) 需求:通过事件管理模块,实现自动驾驶事件的管理与配置,事件触发后产生消息传递给关联模块。 设计:通过单例保证性能与一致性,通过工厂模式方便后续功能的扩展,并保证业务事件定义与具体代码实现解耦,相互隔离。
162
0
C/C++
c++
电商运营系统
一、实现功能 商户管理系统:商户可以线上入驻,发布商品、公告、模型等信息。 1.用户管理 2.商户管理 3.商品管理 4.物流管理 5.报表统计 6.配置管理 二、所有功能都是本团队开发
246
0
C/C++
vue
多机器人仓储系统
负责算法实现,整个系统为自动化订单出货系统,使用多机器人提高效率,算法实现了多机器人的路径规划,货物提取与归类
17
0
C/C++
c++
基于点云驱动的DD马达端面跳动测量
项目背景:为解决DD马达端面跳动测量效率低下、精度不高的问题,使用3D视觉技术,结合Qt、Visual Studio、Pcl点云库开发DD马达端面跳动测量软件。 项目职责:1.设计一种基于曲率和密度的点云分割算法对点云进行分割。2.马达端面可能会有倾斜,设计点云平面拟合算法修正倾斜误差。3. 使用C++和C#混合编程,开发Pcl点云库的C#版本,并封装成dll供C#开发人员用。4.使用C++开发3D相机交互模块,并将其集成到软件中。5.使用Sqlite开发数据管理模块。 项目成果:1.Qt版软件已开发完毕,目前正在测试。2. 修复Pcl库addText3D函数与QVTKWidget控件交互的bug,具体见https://github.com/PointCloudLibrary/pcl/pull/5054,已被合并到master节点。3.开发Pcl库的C#版本,该库已被其他用户使用。地址https://github.com/booksuper/PclCSharp.git 。
194
0
图像处理
c++
巡检机器人
模块:pad,server,base,location,nav,嵌入式 任务:pad(50%), server(80%),base(40%) pad端主要使用mvc框架,包含ui模块,通讯模块,三方库,相机封装库,公用模块,数据库,ftp...
93
0
C/C++
c++
基于Linux的轻量级、高性能、多线程WEB服务器
1.项目描述:C++实践WEB服务器,实现支持HTTP的GET和POST请求、提供高性能并发访问。 2.关键技术:①用IO复用技术EPOLL和线程池实现Reactor和Proactor模型;②主从状态机解析HTTP请求;③用小顶堆和定时信号超时断开连接;④用RAII机制实现数据库连接池;⑤用单例模式和阻塞队列实现同步和异步日志。 3.项目成果:在Ubuntu22.04、i5-1135G7两核CPU、4G内存环境下进行Webbench压力测试,QPS可达30000+。
169
0
C/C++
C++
最值比较规约并行
项目名称:最值比较规约的并行化实现 项目概述: 本项目旨在实现最值比较规约的并行化处理。规约操作是一种在一组值上执行某种操作并生成单个值的技术,例如找出一组数中的最大值或最小值。在大规模数据处理中,规约操作可能会非常耗时。通过利用并行计算,我们可以减少规约操作的运行时间,从而提高整体的数据处理速度。 主要特点: 1. 利用并行计算的优势,显著提高规约操作的速度和效率。 2. 通过并行编程(例如使用OpenMP或CUDA),实现最值比较规约的并行化。 3. 适用于大规模数据处理,提高数据处理的效率。 实施步骤: 1. 设计并实现一个基于并行计算的最值比较规约算法。 2. 对算法进行优化,以充分利用并行计算的优势。 3. 对大规模数据进行测试,验证算法的效率和正确性。 预期成果: 本项目的完成将显著提高最值比较规约操作的速度和效率,有助于提升大规模数据处理的能力。
143
0
C/C++
c++
DCT变换并行化
项目名称:GPU并行化的离散余弦变换(DCT) 项目概述: 本项目旨在实现离散余弦变换(DCT)的GPU并行化。离散余弦变换是一种在信号和图像处理中广泛使用的技术,特别是在JPEG压缩中。然而,对大规模数据进行DCT变换可能会消耗大量的计算资源和时间。通过使用GPU并行计算,我们可以显著提高DCT变换的速度和效率。 主要特点: 1. 利用GPU的并行计算能力对DCT变换进行优化,大幅提升了计算效率和速度。 2. 通过CUDA编程实现了DCT变换的并行化,使得大规模数据的处理成为可能。 3. 项目中实现了对2D DCT变换的优化,这对于图像处理尤其重要。 实施步骤: 1. 设计并实现一个基于CUDA的DCT变换算法。 2. 在GPU上对算法进行优化,以充分利用其并行计算能力。 3. 对大规模数据进行测试,验证算法的效率和正确性。 预期成果: 本项目的完成将显著提高DCT变换的计算速度和效率,有助于推动图像处理和信号处理等领域的发展。
181
0
C/C++
c++
无人值守轨道机器人客户端
1. 监控摄像头采用的海康的产品,负责对接海康的SDK,采集和控制摄像头,使用C++语言 2. 设计和实现轨道机器人的驱动协议,封装底层的Modbus协议,通过网络暴露接口,供外部调用 3. 使用C++语言和QT开发机器人的控制后台界面,实现了机器人的运动监控和控制,以及参数配置
177
0
C/C++
c++
无人值守驾校驾驶舱软硬件系统开发
1. 负责开发驾校智能培训驾驶舱底层软硬件架构并实现 设计和实现了驾驶舱的电气部分的电路和硬件驱动程序,电路设计采用了Autodesk的Eagle来设计PCB和电路仿真。驱动程序部分使用的开源的Arduino框架。针对驾驶舱的仪表和驾驶外设,采用了模拟手柄驱动的方式来实现和上位机的对接。 2. 开发驾校车辆裸眼3d虚拟现实显示软硬件方案 针对异形显示屏,开发针对性的投影变换算法,模拟人眼3D显示效果。 3. 设计与实现基于投影仪的高清虚拟现实显示软硬件方案 针对投影仪的显示,开发针对性的投影变换算法,模拟人眼3D显示效果,同时提高投影仪的显示清晰度。 4. 虚幻引擎二次开发,实现一整套工具链,以配合驾校培训流程上层应用的开发 5. 设计与实现驾校无人值守自动化培训系统的服务器端,采用分布式架构,支持高并发、高吞吐量,可随业务量增加水平扩展。 服务器端采用Node.js设计和实现了分布式、可扩展的服务器端,实现驾驶舱的远程监控、学员和教练远程语言和视频通话。使用QT编写了驾驶舱内的客户端界面。
202
0
C/C++
游戏
道亨电缆井精细化设计程序
参数化创建国网典设中的电缆井,分为直线井、转角井、三通井等多种固定电缆井;包括电缆井平断面图的绘制,三维渲染功能,添加电缆井内部组件,如:立柱支架、预留洞、人孔等; 输出电缆井的 CAD 施工图,以及 CAD 图册; 后续根据井基础模块开发自由绘制平面轮廓,并根据轮廓和其他参数生成各种样子的异形井; 然后从二维绘制轮廓升级成三维平面绘制电缆井内轮廓后,生成异形井; 主要业绩: 新增多种电缆井类型,例如:四通井、多种竖井; 根据客户需求,添加 gim 文件格式输出; 异形井轮廓绘制实现; 电缆井及组件渲染和平断面绘制; 异形井生成文件以及井的渲染和平断面绘制
208
0
C/C++
c++
当前共205个项目
登录查看更多
登录
登录后即可上传、下载作品
分类
TensorFlow
V
Egret
Red
VBScript
Ruby
WGCLOUD
以太坊
Vala
Lisp
×
寻找源码
源码描述
联系方式
提交
重点城市程序员兼职推荐
北京程序员兼职
上海程序员兼职
深圳程序员兼职
杭州程序员兼职
广州程序员兼职
成都程序员兼职
南京程序员兼职
武汉程序员兼职
西安程序员兼职
重庆程序员兼职
郑州程序员兼职
长沙程序员兼职
苏州程序员兼职
合肥程序员兼职
厦门程序员兼职
济南 程序员兼职
青岛程序员兼职
天津程序员兼职
大连程序员兼职
福州程序员兼职
石家庄程序员兼职
沈阳程序员兼职
太原程序员兼职
无锡程序员兼职
南昌程序员兼职
哈尔滨程序员兼职
南宁程序员兼职
珠海程序员兼职
宁波程序员兼职
昆明程序员兼职
东莞程序员兼职
贵阳程序员兼职
美国程序员兼职
长春程序员兼职
温州程序员兼职
佛山程序员兼职
常州程序员兼职
呼和浩特程序员兼职
兰州程序员兼职
乌鲁木齐程序员兼职
中山程序员兼职
海口程序员兼职
洛阳程序员兼职
更多
重点岗位程序员兼职推荐
C++兼职
Rust兼职
小程序兼职
cocos2d-x兼职
Unity3D兼职
DBA兼职
运维兼职
测试兼职
移动其他兼职
Go兼职
UE设计师兼职
全栈兼职
技术创始人兼职
CTO兼职
项目经理兼职
产品经理兼职
原画师兼职
UI设计师兼职
前端兼职
iOS兼职
Android兼职
Node.js兼职
Ruby兼职
架构师兼职
Python兼职
C#兼职
C兼职
PHP兼职
Java兼职
鸿蒙兼职
区块链兼职
人工智能兼职
硬件开发兼职
更多
您好 👋
我们能提供什么帮助?
向我们发送消息
常见问题、使用帮助、人工咨询等
智能搜索
手机访问
使用微信扫一扫